Массив Рауса - это табличный метод позволяющий установить стабильность системы, использующей только коэффициенты характеристики многочлен. Центральное место в области проектирование систем управления, то Теорема Рауса – Гурвица и массив Рауса появляются с помощью Евклидов алгоритм и Теорема Штурма в оценке Индексы Коши.
Индекс Коши
Учитывая систему:

Если не считать корней  лежать на воображаемой оси и позволяя
лежать на воображаемой оси и позволяя
 = Количество корней с отрицательными реальными частями, и
= Количество корней с отрицательными реальными частями, и = Количество корней с положительными реальными частями
= Количество корней с положительными реальными частями
тогда у нас есть

Выражая  в полярной форме имеем
в полярной форме имеем

куда
![хо (х) = {sqrt {{mathfrak {Re}} ^ {2} [f (x)] + {mathfrak {Im}} ^ {2} [f (x)]}} quad (5)](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
и
![heta (x) = an ^ {{- 1}} {ig (} {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)] {ig)} quad (6)](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)
из (2) заметим, что

куда

Теперь, если яth корень имеет положительную действительную часть, то (используя обозначение y = (RE [y], IM [y]))
![{displaystyle {egin {выровнено} heta _ {r_ {i}} (x) {ig |} _ {x = -jinfty} & = angle (x-r_ {i}) {ig |} _ {x = -jinfty } & = угол (0- {mathfrak {Re}} [r_ {i}], - infty - {mathfrak {Im}} [r_ {i}]) & = angle (- | {mathfrak {Re}} [r_ {i}] |, -infty) & = pi + lim _ {phi o infty} an ^ {- 1} phi = {frac {3pi} {2}} quad (9) end {align}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
и
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = j0} = angle (- | {mathfrak {Re}} [r_ {i}] |, 0) = pi - an ^ { -1} 0 = число Пи (10)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
и
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = jinfty} = angle (- | {mathfrak {Re}} [r_ {i}] |, infty) = pi -lim _ { phi o infty} an ^ {- 1} phi = {frac {pi} {2}} quad (11)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
Аналогично, если ith корень имеет отрицательную действительную часть,
![{displaystyle {egin {выровнено} heta _ {r_ {i}} (x) {ig |} _ {x = -jinfty} & = angle (x-r_ {i}) {ig |} _ {x = -jinfty } & = angle (0- {mathfrak {Re}} [r_ {i}], - infty - {mathfrak {Im}} [r_ {i}]) & = angle (| {mathfrak {Re}} [ r_ {i}] |, -infty) & = 0-lim _ {phi o infty} an ^ {1} phi = - {frac {pi} {2}} quad (12) end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb66015512b6985b691bd082240e95221662faa4)
и
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = j0} = angle (| {mathfrak {Re}} [r_ {i}] |, 0) = an ^ {- 1} 0 = 0, четырехъядерный (13)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
и
![{displaystyle heta _ {r_ {i}} (x) {ig |} _ {x = jinfty} = angle (| {mathfrak {Re}} [r_ {i}] |, infty) = lim _ {phi o infty } an ^ {- 1} phi = {frac {pi} {2}}, quad (14)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)
Из (9) - (11) находим, что  когда яth корень имеет положительную действительную часть, и из (12) - (14) находим, что
когда яth корень имеет положительную действительную часть, и из (12) - (14) находим, что  когда яth корень имеет отрицательную действительную часть. Таким образом,
когда яth корень имеет отрицательную действительную часть. Таким образом,

Итак, если мы определим

тогда у нас есть отношения

и объединение (3) и (17) дает нам
 и
и 
Следовательно, учитывая уравнение степени  нам нужно только оценить эту функцию
нам нужно только оценить эту функцию  определить , количество корней с отрицательными действительными частями и , количество корней с положительными действительными частями.
определить , количество корней с отрицательными действительными частями и , количество корней с положительными действительными частями.
 |
| Рисунок 1 |
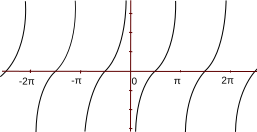
 против против  |
В соответствии с (6) и рис.1 график против , варьируя  на интервале (a, b), где
на интервале (a, b), где  и
и  являются целыми числами, кратными
являются целыми числами, кратными  , эта вариация вызывает функцию
, эта вариация вызывает функцию  увеличиться на , указывает на то, что при движении из точки а в точку б, "выпрыгнул" из
увеличиться на , указывает на то, что при движении из точки а в точку б, "выпрыгнул" из  к
к  еще раз, чем он прыгнул к . Аналогично, если мы изменим на интервале (a, b) это изменение, вызывающее уменьшиться на , где снова кратно на обоих
еще раз, чем он прыгнул к . Аналогично, если мы изменим на интервале (a, b) это изменение, вызывающее уменьшиться на , где снова кратно на обоих  и
и  , следует, что
, следует, что ![{displaystyle an heta (x) = {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f) прыгнул с к еще раз, чем он прыгнул к в качестве варьировалась в указанном интервале.
прыгнул с к еще раз, чем он прыгнул к в качестве варьировалась в указанном интервале.
Таким образом,  является умноженная на разницу между количеством точек, в которых
является умноженная на разницу между количеством точек, в которых ![{displaystyle {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c) прыгает из к и количество точек, в которых прыгает из к в качестве колеблется в интервале
прыгает из к и количество точек, в которых прыгает из к в качестве колеблется в интервале  при условии, что в
при условии, что в  ,
, ![{displaystyle an [heta (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef) определено.
определено.
 |
| фигура 2 |
 против против |
В случае, когда отправная точка несовместима (т.е.  , я = 0, 1, 2, ...) конечная точка также будет несовместима с уравнением (17) (поскольку целое число и целое число, будет целым числом). В этом случае мы можем добиться того же показателя (разницы в положительных и отрицательных скачках), сдвинув оси касательной функции на
, я = 0, 1, 2, ...) конечная точка также будет несовместима с уравнением (17) (поскольку целое число и целое число, будет целым числом). В этом случае мы можем добиться того же показателя (разницы в положительных и отрицательных скачках), сдвинув оси касательной функции на  , добавив к . Таким образом, наш индекс теперь полностью определен для любой комбинации коэффициентов в оценивая
, добавив к . Таким образом, наш индекс теперь полностью определен для любой комбинации коэффициентов в оценивая ![{displaystyle an [heta] = {mathfrak {Im}} [f (x)] / {mathfrak {Re}} [f (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8) на интервале (a, b) =
на интервале (a, b) =  когда наша начальная (и, следовательно, конечная) точка не является несоответствием, и оценивая
когда наша начальная (и, следовательно, конечная) точка не является несоответствием, и оценивая
![{displaystyle an [heta '(x)] = an [heta + pi / 2] = - cot [heta (x)] = - {mathfrak {Re}} [f (x)] / {mathfrak {Im}} [ f (x)] quad (19)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)
в течение указанного интервала, когда наша отправная точка несовместима.
Эта разница, , отрицательных и положительных несоответствий прыжков, обнаруженных при пересечении из  к
к  называется индексом Коши тангенса фазового угла, причем фазовый угол равен или же
называется индексом Коши тангенса фазового угла, причем фазовый угол равен или же  , в зависимости от
, в зависимости от  является целым числом, кратным или нет.
является целым числом, кратным или нет.
Критерий Рауса
Чтобы вывести критерий Рауса, сначала мы будем использовать другую нотацию, чтобы различать четные и нечетные члены :

Теперь у нас есть:

Следовательно, если даже,
![{displaystyle {egin {выравнивается} f (jomega) & = (- 1) ^ {n / 2} {ig [} a_ {0} omega ^ {n} -a_ {1} omega ^ {n-2} + a_ {2} omega ^ {n-4} -cdots {ig]} & {} quad (23) & + j (-1) ^ {(n / 2) -1} {ig [} b_ {0} omega ^ {n-1} -b_ {1} омега ^ {n-3} + b_ {2} омега ^ {n-5} -cdots {ig]} & {} end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e495902015ba0b7f57501e6d3d82ee9ab5ef62a)
и если странно:
![{displaystyle {egin {align} f (jomega) & = j (-1) ^ {(n-1) / 2} {ig [} a_ {0} omega ^ {n} -a_ {1} omega ^ {n -2} + a_ {2} omega ^ {n-4} -cdots {ig]} & {} quad (24) & + (- 1) ^ {(n-1) / 2} {ig [} b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + b_ {2} omega ^ {n-5} -cdots {ig]} & {} end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2031e504dd4c89445e158080035a39a2e0e17c2b)
Теперь заметьте, что если - целое нечетное число, то по (3)  странно. Если - нечетное целое число, тогда
странно. Если - нечетное целое число, тогда  тоже странно. Точно так же этот же аргумент показывает, что когда даже, будет даже. Уравнение (15) показывает, что если даже, является целым числом, кратным . Следовательно, определяется для четный, и, таким образом, правильный индекс для использования, когда n четно, и аналогично
тоже странно. Точно так же этот же аргумент показывает, что когда даже, будет даже. Уравнение (15) показывает, что если даже, является целым числом, кратным . Следовательно, определяется для четный, и, таким образом, правильный индекс для использования, когда n четно, и аналогично  определяется для odd, что делает его правильным индексом в последнем случае.
определяется для odd, что делает его правильным индексом в последнем случае.
Таким образом, из (6) и (23) при четное:
![{displaystyle Delta = I _ {- infty} ^ {+ infty} {frac {- {mathfrak {Im}} [f (x)]} {{mathfrak {Re}} [f (x)]}} = I _ {- infty} ^ {+ infty} {frac {b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + cdots} {a_ {0} omega ^ {n} -a_ {1 } омега ^ {n-2} + ldots}} quad (25)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9829781584a0ac5eac8c828f3b075583bb496da)
а из (19) и (24) для странный:
![{displaystyle Delta = I _ {- infty} ^ {+ infty} {frac {{mathfrak {Re}} [f (x)]} {{mathfrak {Im}} [f (x)]}} = I _ {- infty } ^ {+ infty} {frac {b_ {0} omega ^ {n-1} -b_ {1} omega ^ {n-3} + ldots} {a_ {0} omega ^ {n} -a_ {1} омега ^ {n-2} + ldots}} quad (26)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d8786a9be2f8a0f8cff61b436453fa922966c5d)
И вот, мы оцениваем один и тот же индекс Коши для обоих:

Теорема Штурма
Штурм дает нам метод оценки  . Его теорема гласит следующее:
. Его теорема гласит следующее:
Дана последовательность многочленов  куда:
куда:
1) Если  тогда
тогда  ,
,  , и
, и ![{displaystyle operatorname {sign} [f_ {k-1} (x)] = - operatorname {sign} [f_ {k + 1} (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a866748052776183bc0b2820b98b37558342d6a5)
2)  за
за 
и мы определяем  как количество смен знака в последовательности за фиксированное значение , тогда:
как количество смен знака в последовательности за фиксированное значение , тогда:

Последовательность, удовлетворяющая этим требованиям, получается с помощью Евклидов алгоритм, который выглядит следующим образом:
Начиная с  и
и  , и обозначая оставшуюся часть
, и обозначая оставшуюся часть  к
к  и аналогично обозначая оставшуюся часть
и аналогично обозначая оставшуюся часть  к
к  , и так далее, получаем соотношения:
, и так далее, получаем соотношения:

или вообще

где последний ненулевой остаток,  поэтому будет наивысшим общим фактором
поэтому будет наивысшим общим фактором  . Можно заметить, что построенная таким образом последовательность будет удовлетворять условиям теоремы Штурма, и, таким образом, был разработан алгоритм для определения указанного индекса.
. Можно заметить, что построенная таким образом последовательность будет удовлетворять условиям теоремы Штурма, и, таким образом, был разработан алгоритм для определения указанного индекса.
Именно при применении теоремы Штурма (28) к (29) с использованием описанного выше алгоритма Евклида формируется матрица Рауса.
Мы получили

и идентифицируя коэффициенты этого остатка как  ,
,  ,
,  ,
,  и т. д. делает наш сформированный остаток
и т. д. делает наш сформированный остаток

куда

Продолжение алгоритма Евклида с этими новыми коэффициентами дает нам

где мы снова обозначаем коэффициенты при остатке  к
к  ,
,  ,
,  ,
,  ,
,
делая наш сформированный остаток

и давая нам

Строки массива Рауса определяются именно этим алгоритмом при применении к коэффициентам (20). Следует отметить, что в обычном случае многочлены  и
и  иметь как высший общий фактор
иметь как высший общий фактор  и таким образом будет многочлены в цепочке .
и таким образом будет многочлены в цепочке .
Заметим теперь, что при определении знаков членов последовательности многочленов что в  доминирующая сила
доминирующая сила  будет первым членом каждого из этих многочленов, и, следовательно, только те коэффициенты, соответствующие старшим степеням в
будет первым членом каждого из этих многочленов, и, следовательно, только те коэффициенты, соответствующие старшим степеням в  , и , которые
, и , которые  ,
,  , , , ... определить признаки , , ..., в .
, , , ... определить признаки , , ..., в .
Итак, мы получаем  то есть,
то есть,  количество смен знака в последовательности
количество смен знака в последовательности  ,
,  ,
,  , ... количество смен знака в последовательности , , , , ... и
, ... количество смен знака в последовательности , , , , ... и  ; то есть
; то есть  количество смен знака в последовательности
количество смен знака в последовательности  ,
,  ,
,  , ... количество смен знака в последовательности ,
, ... количество смен знака в последовательности ,  , ,
, ,  , ...
, ...
Поскольку наша сеть , , , , ... буду иметь члены ясно, что  поскольку внутри
поскольку внутри  если идет от к изменение знака не произошло, в пределах
если идет от к изменение знака не произошло, в пределах  идущий от к один имеет, и так же для всех переходов (не будет членов, равных нулю), дающие нам общее изменение знака.
идущий от к один имеет, и так же для всех переходов (не будет членов, равных нулю), дающие нам общее изменение знака.
В качестве  и
и  , а из (18)
, а из (18)  у нас есть это
у нас есть это  и получили теорему Рауса -
и получили теорему Рауса -
Количество корней действительного многочлена  лежащие в правой полуплоскости
лежащие в правой полуплоскости  равно количеству смен знака в первом столбце схемы Рауса.
равно количеству смен знака в первом столбце схемы Рауса.
И для стабильного случая, когда  тогда
тогда  по которому мы имеем знаменитый критерий Рауса:
по которому мы имеем знаменитый критерий Рауса:
Чтобы все корни многочлена чтобы иметь отрицательные действительные части, необходимо и достаточно, чтобы все элементы в первом столбце схемы Рауса были отличны от нуля и имели одинаковый знак.
Рекомендации
- Гурвиц, А., "Об условиях, при которых уравнение имеет только корни с отрицательными действительными частями", Rpt. в избранных статьях по математическим направлениям теории управления / Под ред. R. T. Ballman et al. Нью-Йорк: Дувр 1964
- Раус Э. Дж. Трактат об устойчивости данного состояния движения. Лондон: Macmillan, 1877. Rpt. в области устойчивости движения / Под ред. А. Т. Фуллер. Лондон: Тейлор и Фрэнсис, 1975
- Феликс Гантмахер (Переводчик Дж. Л. Бреннера) (1959) Приложения теории матриц, стр 177–80, Нью-Йорк: Interscience.

