Цифровое командное управление - Digital Command Control
Цифровое командное управление (DCC) - это стандарт для работы системы модельные железные дороги в цифровом виде. При оснащении системой цифрового командного управления локомотивы на одном и том же электрическом участке пути могут управляться независимо.
Протокол DCC определен Рабочей группой Digital Command Control Национальная ассоциация модельных железных дорог (NMRA). NMRA зарегистрировало термин DCC, поэтому, хотя термин Цифровое командное управление иногда используется для описания любой цифровой модели системы управления железной дорогой, строго говоря, это относится к NMRA DCC.
История и протоколы
Цифровая система командного управления была разработана (по контракту с немецкой компанией Lenz Elektronik GmbH) в 1980-х годах для двух немецких производителей железнодорожных моделей: Мерклин и Арнольд. Первые цифровые декодеры, которые произвела компания Lenz, появились на рынке в начале 1989 г. для Arnold (N) и в середине 1990 г. для Märklin (Z, H0 и 1; Digital =).[1] Мерклин и Арнольд вышли из соглашения по вопросам патентов, но Ленц продолжил разработку системы. В 1992 году Стэн Эймс, который позже возглавил рабочую группу NMRA / DCC, исследовал систему Märklin / Lenz как возможного кандидата на стандарты NMRA / DCC. Когда комитет командного управления NMRA запросил у производителей материалы для предложенного им стандарта командного управления в 1990-х годах, Мерклин и Keller Engineering представили свои системы для оценки.[2] Комитет был впечатлен системой Мерклина / Ленца и на раннем этапе остановился на цифровых технологиях. В конечном итоге NMRA разработало свой собственный протокол, основанный на системе Ленца, и расширил его. Позднее система получила название Digital Command Control. Первые коммерческие системы, построенные на NMRA DCC, были продемонстрированы на Конвенции NMRA 1993 года, когда был объявлен предлагаемый стандарт DCC. Предлагаемый стандарт был опубликован в выпуске журнала за октябрь 1993 г. Модель Railroader журнал до его принятия.
Протокол DCC является предметом двух стандарты опубликовано NMRA: С-9.1 указывает электрический стандарт, и С-9.2 определяет коммуникации стандарт. Также доступны несколько документов о рекомендуемых практиках.
Протокол DCC определяет уровни сигналов и тайминги на треке. DCC не определяет протокол, используемый между командной станцией DCC и другими компонентами, такими как дополнительные дроссели. Существует множество проприетарных стандартов, и, как правило, командные станции от одного поставщика несовместимы с регуляторами от другого поставщика.
RailCom
В 2006 году Ленц вместе с Кюном, Зимо и Тамсом начал разработку расширения протокола DCC, чтобы обеспечить канал обратной связи от декодеров к станции управления. Этот канал обратной связи обычно может использоваться для сигнализации о том, какой поезд занимает определенный участок, а также для информирования командного пункта о фактической скорости двигателя. Этот канал обратной связи известен под названием RailCom, и был стандартизирован в 2007 году как NMRA RP 9.3.1.
Цитата «Стандарты и Рекомендуемая практика NMRA»:[3]
S-9.3 Стандарт двунаправленной связи DCC S-9.3.1 (снято с производства) S-9.3.2 Передача базового декодера DCC - (обновлено 20.12.2012) НА ПЕРЕСМОТРЕ
Как работает DCC
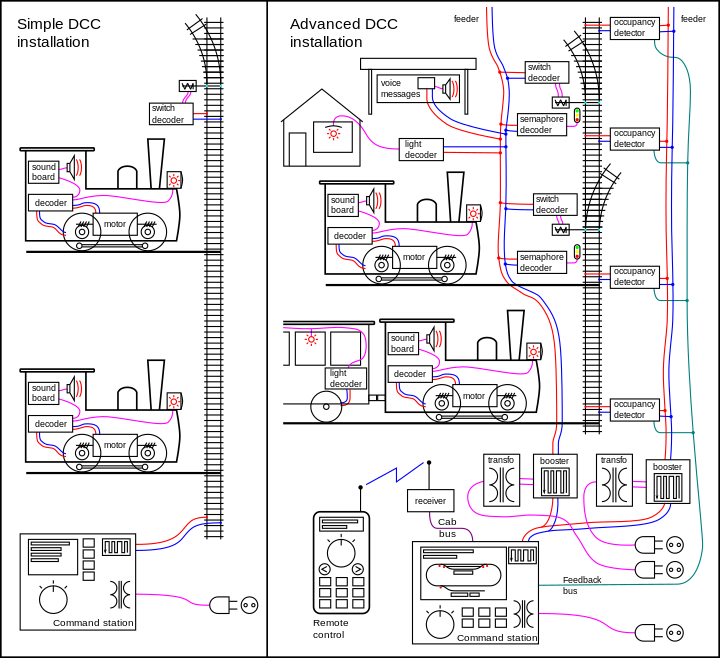
Система состоит из источников питания, командных станций, ускорителей и декодеров.
Командная станция DCC создает цифровой пакет. Многие командные станции интегрированы с усилителем (бустером), который в сочетании с источником питания модулирует напряжение на дорожке для кодирования цифровой сообщения при подаче электроэнергии. Для больших систем могут использоваться дополнительные ускорители для обеспечения дополнительной мощности.
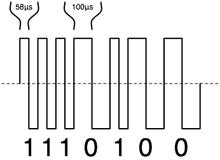
Напряжение на дорожке - это чистый цифровой сигнал. Сигнал DCC не соответствует синусоидальная волна поскольку это не AC форма волны. Командная станция / усилитель быстро включает и выключает напряжение на рельсах, что приводит к модулированному пульсовая волна. Одна шина всегда противоположна другой, и каждый импульс данных повторяется. Продолжительность подачи напряжения обеспечивает метод кодирования данных. Представить двоичный 1 время короткое (номинально 58 мкс), а ноль представлено более длинным периодом (номинально не менее 100 мкс). Поскольку полярность отсутствует, направление движения не зависит от фазы рельса.
Каждый локомотив оснащен многофункциональным DCC декодер который принимает сигналы с трассы и после исправление, направляет питание на электрический двигатель как просили. Каждому декодеру дается уникальный рабочий номер (адрес ) для компоновки и не будет действовать по командам, предназначенным для другого декодера, обеспечивая тем самым независимое управление локомотивами в любом месте компоновки без особых требований к проводке. Электроэнергия также может быть направлена на осветительные приборы, дымогенераторы и звуковые генераторы. Этими дополнительными функциями можно управлять удаленно с контроллера DCC. Стационарные декодеры может также получать команды от контроллера аналогичным образом, что позволяет управлять стрелочными переводами, разъединителями, другими рабочими аксессуарами (такими как объявления станции) и светом.
В сегменте гусениц с приводом от DCC возможно питание одной аналоговой модели локомотива отдельно (или в дополнение к двигателям, оснащенным DCC), в зависимости от выбора коммерчески доступных базовых систем. Этот метод известен как нулевое растяжение. Импульс высокого или низкого уровня нулевых битов может быть расширен, чтобы сделать среднее напряжение (и, следовательно, ток) прямым или обратным. Однако, поскольку исходная мощность содержит большую гармоническую составляющую, двигатели постоянного тока нагреваются намного быстрее, чем при питании от постоянного тока, и некоторые типы двигателей (особенно электродвигатели без сердечника ) может быть поврежден сигналом DCC.
Преимущества перед аналоговым управлением

Большим преимуществом цифрового управления является индивидуальное управление локомотивами, где бы они ни находились. При аналоговом управлении для независимой работы более чем одного локомотива требуется, чтобы путь был соединен в отдельные «блоки», каждый из которых имеет переключатели для выбора контроллера. Используя цифровое управление, локомотивами можно управлять, где бы они ни находились.
Цифровые декодеры локомотивов часто включают моделирование «инерции», когда локомотив будет постепенно увеличивать или уменьшать скорость реалистичным образом. Многие декодеры также постоянно регулируют мощность двигателя, чтобы поддерживать постоянную скорость. Большинство цифровых контроллеров позволяют оператору установить скорость одного локомотива, а затем выбрать другой локомотив для управления его скоростью, в то время как предыдущий локомотив сохраняет свою скорость.
Последние разработки включают бортовые звуковые модули для локомотивов размером от Шкала N.
Требования к проводке обычно снижаются по сравнению с традиционной схемой питания постоянного тока. При цифровом управлении аксессуарами проводка распределяется по дополнительным декодерам, а не индивидуально подключается к центральной панели управления. Для портативных компоновок это может значительно сократить количество межплатных соединений - только для цифрового сигнала и любых дополнительных источников питания требуется кросс-соединение с основной платой.
Пример схемы
Конкурирующие системы
Есть две основные европейские альтернативы: Selectrix, открытый Normen Europäischer Modellbahnen (NEM) стандарт, а Märklin Digital фирменная система. Система US Rail-Lynx подает питание на рельсы с фиксированным напряжением, в то время как команды отправляются в цифровом виде с использованием инфракрасное излучение.
Другие системы включают Цифровая командная система и Командное управление Trainmaster.
Несколько крупных производителей (в том числе Мерклин, Роко, Hornby и Бахманн ), вышли на рынок DCC вместе с производителями, которые специализируются на нем (включая Lenz, Digitrax, ESU, ZIMO, Kühn, Tams, North Coast Engineering (NCE), а также EasyDCC, Sound Traxx, Lok Sound, Train Control Systems и CVP Products). ZTC). Большинство центральных блоков Selectrix являются многопротокольными блоками, полностью или частично поддерживающими DCC (например, Rautenhaus, Stärz и MTTM).
Смотрите также
использованная литература
- ^ Вернер Краус. (1991). Modellbahn Digital Praxis: Aufbau, Betrieb und Selbstbau. Дюссельдорф: Альба. ISBN 3-87094-567-2
- ^ Домашняя страница DCC "Домашняя страница DCC", NMRA.org, по состоянию на 19 декабря 2010 г.
- ^ Домашняя страница DCC «С-9.3.1 (снято с производства)», NMRA.org, по состоянию на 23 ноября 2018 г.
внешние ссылки
- Страница Стандарты и Рекомендуемая практика NMRA
- Логотип DCC, зарегистрированный как товарный знак NMRA
- История DCC на DCCWiki
- DCCWiki
- Электропроводка для DCC
- Страница информации о продукте Hornby DCC
- Model Rectifier Corporation - производитель продуктов, связанных с DCC
- Digitrax - производитель продуктов, связанных с DCC, мобильных декодеров, стартовых наборов и т. Д.
- Системы управления поездом - Производитель продукции, связанной с DCC
- NCE Power Pro System - производитель продуктов, связанных с DCC
- Система EasyDCC CVP - производитель продуктов, связанных с DCC
- OpenDCC - открытый проект для создания собственных декодеров, командных станций и т. Д.