Вибрация - Vibration
| Часть серии по |
| Классическая механика |
|---|
Основные темы |
Категории ► Классическая механика |

Вибрация это механическое явление, посредством которого колебания происходит о точка равновесия. Слово происходит от латинского вибрация («трясти, размахивать»). Колебания могут быть периодический, например, движение маятника - или случайный, например, движение шины по гравийной дороге.
Может быть желательна вибрация: например, движение камертон, то тростник в деревянный духовой инструмент или же гармоника, а мобильный телефон, или конус громкоговоритель.
Однако во многих случаях вибрация нежелательна, энергия и создание нежелательных звук. Например, колебательные движения двигатели, электродвигатели, или любой механическое устройство в эксплуатации обычно нежелательны. Такие колебания могут быть вызваны дисбалансы во вращающихся частях неровная трение, или зацепление механизм зубы. Тщательный дизайн обычно сводит к минимуму нежелательные вибрации.
Исследования звука и вибрации тесно связаны. Звук или давление волны, создаются вибрирующими конструкциями (например, голосовые связки ); эти волны давления могут также вызывать вибрацию конструкций (например, барабанная перепонка ). Следовательно, попытки уменьшить шум часто связаны с проблемами вибрации.


Типы вибрации
Бесплатная вибрация происходит, когда механическая система приводится в движение с первоначального ввода и позволяет свободно вибрировать. Примерами этого типа вибрации являются втягивание ребенка обратно на качели и отпускание его или удар по камертону, позволяющий ему зазвенеть. Механическая система вибрирует на одном или нескольких собственные частоты и увлажняет вплоть до неподвижности.
Принудительная вибрация это когда изменяющееся во времени возмущение (нагрузка, смещение или скорость) применяется к механической системе. Возмущение может быть периодическим и установившимся входом, переходным входом или случайным входом. Периодический вход может быть гармоническим или негармоническим возмущением. Примеры этих типов вибрации включают тряску стиральной машины из-за дисбаланса, транспортную вибрацию, вызванную двигателем или неровной дорогой, или вибрацию здания во время землетрясения. Для линейных систем частота установившейся вибрационной реакции, возникающей в результате приложения периодического гармонического входного сигнала, равна частоте приложенной силы или движения, причем величина отклика зависит от реальной механической системы.
Затухающая вибрация: Когда энергия колеблющейся системы постепенно рассеивается за счет трения и других сопротивлений, считается, что колебания затухают. Вибрации постепенно уменьшаются или изменяются по частоте или интенсивности или прекращаются, и система остается в своем положении равновесия. Примером такого типа вибрации является автомобильная подвеска увлажненный амортизатор.
Вибрационные испытания
Вибрационное испытание выполняется путем введения в конструкцию функции нагнетания, обычно с помощью какого-либо типа встряхивателя. В качестве альтернативы, DUT (тестируемое устройство) прикрепляется к «столу» шейкера. Вибрационное испытание проводится для изучения реакции испытуемого устройства (ИУ) на определенную среду вибрации. Измеряемый отклик может представлять собой способность функционировать в условиях вибрации, усталостную долговечность, резонансные частоты или выходной звук писка и дребезжания (NVH ). Проверка на скрип и дребезжание выполняется с помощью специального типа тихий шейкер который производит очень низкий уровень шума во время работы.
Для относительно низкочастотного нагнетания (обычно менее 100 Гц) используются сервогидравлические (электрогидравлические) вибраторы. Для более высоких частот (обычно от 5 Гц до 2000 Гц) используются электродинамические шейкеры. Как правило, одна или несколько «входных» или «контрольных» точек, расположенных на стороне DUT вибрационного приспособления, поддерживают заданное ускорение.[1] Другие «ответные» точки могут испытывать более высокий уровень вибрации (резонанс) или более низкий уровень вибрации (антирезонанс или демпфирование), чем контрольная точка (точки). Часто бывает желательно достичь антирезонанса, чтобы система не стала слишком шумной, или для уменьшения нагрузки на определенные части из-за режимов вибрации, вызванных определенными частотами вибрации.[2]
Наиболее распространенные типы услуг вибрационных испытаний, проводимых лабораториями вибрационных испытаний, - это синусоидальные и случайные. Синусоидальные (одночастотные) тесты выполняются для изучения структурной характеристики тестируемого устройства (DUT). На раннем этапе вибрационных испытаний контроллеры вибрационных машин ограничивались только управлением синусоидальным движением, поэтому выполнялись только синусоидальные испытания. Позже более совершенные аналоговые, а затем и цифровые контроллеры смогли обеспечить случайное управление (все частоты одновременно). Как правило, считается, что случайный (все частоты одновременно) тест более точно воспроизводит реальную среду, такую как дорожные воздействия на движущийся автомобиль.
Большинство испытаний на вибрацию проводится одновременно на «одной оси ИУ», даже несмотря на то, что большая часть реальных вибраций возникает одновременно в нескольких осях. MIL-STD-810G, выпущенный в конце 2008 года, метод тестирования 527, требует тестирования нескольких возбудителей. В приспособление для испытания на вибрацию[3] Используемое для присоединения ИУ к вибростолу должно быть рассчитано на частотный диапазон спектра вибрационных испытаний. Трудно сконструировать приспособление для испытания на вибрацию, которое дублирует динамический отклик (механическое сопротивление).[4] фактического монтажа. По этой причине для обеспечения повторяемости между испытаниями на вибрацию вибрационные приспособления не имеют резонансов.[4] в пределах тестового диапазона частот. Как правило, для небольших приспособлений и диапазонов более низких частот разработчик может выбрать конструкцию приспособления, не имеющую резонансов в диапазоне испытательных частот. Это становится труднее по мере увеличения ИУ и увеличения частоты тестирования. В этих случаях стратегии многоточечного управления могут уменьшить некоторые резонансы, которые могут возникнуть в будущем.
Некоторые методы испытаний на вибрацию ограничивают количество перекрестных помех (перемещение точки отклика во взаимно перпендикулярном направлении к проверяемой оси), которое может проявлять приспособление для испытаний на вибрацию. виброскопы.
Анализ вибрации
Анализ вибрации (VA), применяемый в промышленных условиях или в условиях обслуживания, направлен на снижение затрат на обслуживание и время простоя оборудования за счет обнаружения неисправностей оборудования.[5][6] VA - ключевой компонент контроль состояния (CM), и ее часто называют профилактическое обслуживание (PdM).[7] Чаще всего VA используется для обнаружения неисправностей во вращающемся оборудовании (вентиляторы, двигатели, насосы, редукторы и т. Д.), Таких как дисбаланс, несоосность, неисправности подшипников качения и условия резонанса.
VA может использовать единицы смещения, скорости и ускорения, отображаемые как временная форма волны (TWF), но чаще всего используется спектр, полученный из быстрое преобразование Фурье TWF. Спектр вибрации предоставляет важную частотную информацию, которая может помочь определить неисправный компонент.
Основы вибрационного анализа можно понять, изучив простые Масса-пружина-демпфер модель. В самом деле, даже сложная конструкция, такая как кузов автомобиля, может быть смоделирована как "сумма" простых моделей масса-пружина-демпфер. Модель масса – пружина – демпфер является примером простой гармонический осциллятор. Математика, используемая для описания его поведения, идентична другим простым гармоническим осцилляторам, таким как Схема RLC.
Примечание. Эта статья не содержит пошаговых математических выводов, но сосредоточена на основных уравнениях и концепциях анализа вибрации. Пожалуйста, обратитесь к ссылкам в конце статьи для подробных выводов.
Свободная вибрация без демпфирования

Чтобы начать исследование массы, пружины и демпфера, предположим, что демпфирование незначительно и к массе не приложена внешняя сила (т.е. свободная вибрация). Сила, приложенная к массе пружиной, пропорциональна величине растяжения пружины «x» (при условии, что пружина уже сжата из-за веса массы). Константа пропорциональности, k, представляет собой жесткость пружины и имеет единицы измерения силы / расстояния (например, фунт-сила / дюйм или Н / м). Отрицательный знак означает, что сила всегда противодействует движению прикрепленной к ней массы:

Сила, создаваемая массой, пропорциональна ускорению массы, определяемому формулой Второй закон движения Ньютона:

Сумма сил, действующих на массу, порождает это обыкновенное дифференциальное уравнение:


Если предположить, что возникновение вибрации начинается с растяжения пружины на расстояние А и отпустив, решение приведенного выше уравнения, которое описывает движение массы:

Это решение говорит, что он будет колебаться с простые гармонические колебания который имеет амплитуда из А и частота жп. Номер жп называется незатухающая собственная частота. Для простой системы масса-пружина жп определяется как:

Примечание: угловая частота ω (ω = 2 π ж) с единицами радиан в секунду часто используется в уравнениях, потому что он упрощает уравнения, но обычно преобразуется в обычная частота (единицы Гц или эквивалентно циклов в секунду) при указании частоты системы. Если масса и жесткость системы известны, приведенная выше формула может определить частоту, с которой система вибрирует, когда она приводится в движение начальным возмущением. Каждая колебательная система имеет одну или несколько собственных частот, которые одновременно нарушаются при вибрации. Это простое соотношение можно использовать для общего понимания того, что происходит с более сложной системой, когда мы добавляем массу или жесткость. Например, приведенная выше формула объясняет, почему, когда автомобиль или грузовик полностью загружен, подвеска кажется «более мягкой», чем ненагруженная - масса увеличилась, что снизило собственную частоту системы.
Что заставляет систему вибрировать: с точки зрения сохранения энергии
Колебательное движение можно понять с точки зрения сохранение энергии. В приведенном выше примере пружина была увеличена на значение x, и поэтому некоторые потенциальная энергия () хранится весной. После отпускания пружина стремится вернуться в нерастянутое состояние (которое является состоянием с минимальной потенциальной энергией) и в процессе ускоряет массу. В момент, когда пружина достигла своего нерастянутого состояния, вся потенциальная энергия, которую мы передали путем растяжения, была преобразована в кинетическая энергия (). Затем масса начинает замедляться, потому что теперь она сжимает пружину и в процессе передачи кинетической энергии обратно своему потенциалу. Таким образом, колебание пружины сводится к возврату кинетической энергии вперед и назад в потенциальную. В этой простой модели масса продолжает вечно колебаться с той же величиной, но в реальной системе демпфирование всегда рассеивает энергию, в конце концов останавливая пружину.


Свободная вибрация с гашением
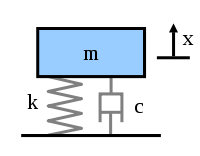
Когда к модели добавляется «вязкий» демпфер, это дает силу, пропорциональную скорости массы. Демпфирование называется вязким, потому что оно моделирует воздействие жидкости внутри объекта. Константа пропорциональности c называется коэффициентом демпфирования и имеет единицы измерения силы по отношению к скорости (фунт-сила-с / дюйм или Н · с / м).

Суммирование сил на массу приводит к следующему обыкновенному дифференциальному уравнению:

Решение этого уравнения зависит от величины демпфирования. Если демпфирование достаточно мало, система по-прежнему вибрирует, но со временем перестает вибрировать. Этот случай называется недостаточным демпфированием, что важно при анализе вибрации. Если демпфирование увеличивается до точки, при которой система больше не колеблется, система достигла точки критическое демпфирование. Если демпфирование превышает критическое значение демпфирования, система чрезмерно демпфированный. Значение, которого должен достичь коэффициент демпфирования для критического демпфирования в модель масс-пружина-демпфер является:

Чтобы охарактеризовать величину демпфирования в системе, коэффициент, называемый коэффициент демпфирования (также известный как коэффициент демпфирования и% критического демпфирования). Этот коэффициент демпфирования представляет собой просто отношение фактического демпфирования к количеству демпфирования, необходимого для достижения критического демпфирования. Формула для коэффициента демпфирования () модели масса-пружина-демпфер составляет:


Например, металлические конструкции (например, фюзеляжи самолетов, коленчатые валы двигателей) имеют коэффициенты демпфирования менее 0,05, а автомобильные подвески находятся в диапазоне 0,2–0,3. Решение проблемы недемпфированная система для модели масса-пружина-демпфер:


Значение Икс, начальная величина и то сдвиг фазы, определяются степенью растяжения пружины. Формулы для этих значений можно найти в справочниках.

Затухающие и незатухающие собственные частоты
Основные моменты, на которые следует обратить внимание в решении, - это экспоненциальный член и функция косинуса. Экспоненциальный член определяет, насколько быстро система «демпфирует» - чем больше коэффициент демпфирования, тем быстрее он демпфирует до нуля. Функция косинуса представляет собой колеблющуюся часть решения, но частота колебаний отличается от незатухающего случая.
Частота в этом случае называется «затухающей собственной частотой», и связана с незатухающей собственной частотой по следующей формуле:


Затухающая собственная частота меньше, чем собственная частота без затухания, но для многих практических случаев коэффициент затухания относительно невелик, и, следовательно, разница незначительна. Поэтому описание демпфирования и отсутствия демпфирования часто опускается при указании собственной частоты (например, при коэффициенте демпфирования 0,1 собственная частота демпфирования всего на 1% меньше, чем незатухающая).
На графиках сбоку показано, как коэффициенты демпфирования 0,1 и 0,3 влияют на то, как система «звенит» со временем. На практике часто проводится экспериментальное измерение свободной вибрации после удара (например, с помощью молотка), а затем определение собственной частоты системы путем измерения скорости колебаний, а также коэффициента демпфирования путем измерения скорости колебаний. разлагаться. Собственная частота и коэффициент демпфирования важны не только для свободных колебаний, но и для характеристики поведения системы при вынужденной вибрации.



Принудительная вибрация с гашением
Поведение модели демпфера с пружинной массой меняется с добавлением гармонической силы. Сила этого типа может быть вызвана, например, вращающимся дисбалансом.

Суммируя силы, действующие на массу, получаем следующее обыкновенное дифференциальное уравнение:

В устойчивое состояние решение этой проблемы можно записать как:

Результат гласит, что масса будет колебаться с той же частотой, жприложенной силы, но с фазовым сдвигом

Амплитуда колебаний «X» определяется по следующей формуле.

Где «r» определяется как отношение частоты гармонической силы к незатухающей собственной частоте модели масса-пружина-демпфер.

Фазовый сдвиг, определяется по следующей формуле.


График этих функций, называемый «частотной характеристикой системы», представляет собой одну из наиболее важных характеристик вынужденной вибрации. В слабозатухающей системе, когда частота воздействия приближается к собственной частоте () амплитуда вибрации может быть чрезвычайно высокой. Это явление называется резонанс (впоследствии собственная частота системы часто упоминается как резонансная частота). В системах подшипников ротора любая скорость вращения, которая вызывает резонансную частоту, называется критическая скорость.

Если в механической системе возникает резонанс, это может быть очень вредным, что в конечном итоге может привести к отказу системы. Следовательно, одна из основных причин для анализа вибрации состоит в том, чтобы предсказать, когда может возникнуть этот тип резонанса, а затем определить, какие шаги предпринять для предотвращения его возникновения. Как показывает график амплитуды, добавление демпфирования может значительно уменьшить величину вибрации. Кроме того, величина может быть уменьшена, если собственная частота может быть смещена в сторону от частоты нагнетания путем изменения жесткости или массы системы. Если система не может быть изменена, возможно, частоту нагнетания можно сместить (например, изменив скорость машины, генерирующей силу).
Ниже приведены некоторые другие моменты в отношении вынужденной вибрации, показанные на графиках частотной характеристики.
- При данном соотношении частот амплитуда вибрации, Икс, прямо пропорциональна амплитуде силы (например, если вы удвоите силу, вибрация удвоится)
- С небольшим демпфированием или без него, вибрация находится в фазе с частотой нагнетания, когда отношение частот р <1 и сдвиг по фазе на 180 градусов при соотношении частот р > 1
- Когда р ≪ 1 амплитуда - это просто прогиб пружины под действием статической силы Это отклонение называется статическим отклонением. Следовательно, когда р ≪ 1 влияние демпфера и массы минимально.
- Когда р ≫ 1 амплитуда вибрации фактически меньше статического прогиба В этой области сила, создаваемая массой (F = ма) является доминирующим, потому что ускорение массы увеличивается с частотой. Поскольку прогиб, наблюдаемый в пружине, Икс, уменьшается в этой области усилие, передаваемое пружиной (F = kx) к базе сводится. Таким образом, система масса-пружина-демпфер изолирует гармоническую силу от монтажного основания, что называется виброизоляция. Большее демпфирование фактически снижает эффект виброизоляции при р ≫ 1, поскольку демпфирующая сила (F = резюме) также передается на базу.
- каким бы ни было демпфирование, вибрация на 90 градусов не совпадает по фазе с частотой нагнетания, когда соотношение частот р = 1, что очень полезно при определении собственной частоты системы.
- каким бы ни было демпфирование, когда р ≫ 1, вибрация на 180 градусов не совпадает по фазе с частотой нагнетания.
- каким бы ни было демпфирование, когда р ≪ 1, вибрация синфазна с частотой нагнетания



Причины резонанса
Резонанс легко понять, если рассматривать пружину и массу как элементы накопления энергии - при этом масса хранит кинетическую энергию, а пружина - потенциальную энергию. Как обсуждалось ранее, когда на массу и пружину не действует внешняя сила, они передают энергию вперед и назад со скоростью, равной собственной частоте. Другими словами, чтобы эффективно перекачивать энергию как в массу, так и в пружину, требуется, чтобы источник энергии подавал энергию со скоростью, равной собственной частоте. Приложение силы к массе и пружине похоже на толкание ребенка на качелях: толчок необходим в нужный момент, чтобы качели становились все выше и выше. Как и в случае с качелями, приложенная сила не должна быть большой для получения больших движений, а должна просто добавлять энергию в систему.
Демпфер вместо накопления энергии рассеивает энергию. Поскольку демпфирующая сила пропорциональна скорости, чем больше движение, тем больше демпфер рассеивает энергию. Следовательно, есть момент, когда энергия, рассеиваемая демпфером, равна энергии, добавленной силой. В этот момент система достигла максимальной амплитуды и будет продолжать вибрировать на этом уровне до тех пор, пока прилагаемая сила остается неизменной. Если затухание отсутствует, нечему рассеивать энергию, и теоретически движение будет продолжать расти до бесконечности.
Приложение "комплексных" сил к модели масса-пружина-демпфер
В предыдущем разделе к модели применялась только простая гармоническая сила, но ее можно значительно расширить с помощью двух мощных математических инструментов. Первый - это преобразование Фурье который принимает сигнал как функцию времени (область времени ) и разбивает его на гармонические составляющие в зависимости от частоты (частотная область ). Например, приложив к модели масса-пружина-демпфер силу, повторяющую следующий цикл, - силу, равную 1ньютон в течение 0,5 секунды, а затем без усилия в течение 0,5 секунды. Этот тип силы имеет форму 1 Гц. прямоугольная волна.
Преобразование Фурье прямоугольной волны генерирует частотный спектр который представляет величину гармоник, составляющих прямоугольную волну (фаза также генерируется, но обычно вызывает меньшее беспокойство и поэтому часто не отображается на графике). Преобразование Фурье также можно использовать для анализа не-периодический такие функции, как переходные процессы (например, импульсы) и случайные функции. Преобразование Фурье почти всегда вычисляется с использованием быстрое преобразование Фурье (БПФ) компьютерный алгоритм в сочетании с оконная функция.
В случае нашей прямоугольной силы первая составляющая на самом деле является постоянной силой 0,5 ньютона и представлена значением 0 Гц в частотном спектре. Следующая составляющая - синусоида с частотой 1 Гц и амплитудой 0,64. Это показано линией с частотой 1 Гц. Остальные компоненты имеют нечетные частоты, и для генерации идеальной прямоугольной волны требуется бесконечное количество синусоидальных волн. Следовательно, преобразование Фурье позволяет интерпретировать силу как сумму применяемых синусоидальных сил вместо более «сложной» силы (например, прямоугольной волны).
В предыдущем разделе решение вибрации было дано для одной гармонической силы, но преобразование Фурье в целом дает множественные гармонические силы. Второй математический инструмент, "принцип суперпозиция ", позволяет суммировать решения от нескольких сил, если система линейный. В случае модели пружина-масса-демпфер система является линейной, если сила пружины пропорциональна смещению, а демпфирование пропорционально скорости в интересующем диапазоне движения. Следовательно, решение проблемы с прямоугольной волной складывается из предсказанных вибраций от каждой из гармонических сил, обнаруженных в частотном спектре прямоугольной волны.
Модель частотной характеристики
Решение проблемы вибрации можно рассматривать как отношение входа / выхода, где сила - это вход, а выход - это вибрация. Представление силы и вибрации в частотной области (амплитуда и фаза) допускает следующее соотношение:

называется частотный отклик функция (также называемая функция передачи, но технически не так точен) и имеет как амплитудную, так и фазовую составляющую (если она представлена как комплексное число, реальная и мнимая составляющие). Величина частотной характеристики (АЧХ) была представлена ранее для системы масса – пружина – демпфер.


Фаза FRF также была представлена ранее как:


Например, расчет FRF для системы масса – пружина – демпфер с массой 1 кг, жесткостью пружины 1,93 Н / мм и коэффициентом демпфирования 0,1. Значения пружины и массы дают собственную частоту 7 Гц для этой конкретной системы. Применение прямоугольной волны частотой 1 Гц, полученной ранее, позволяет рассчитать прогнозируемую вибрацию массы. На рисунке показана результирующая вибрация. В этом примере частота четвертой гармоники прямоугольной волны составляет 7 Гц. Частотная характеристика массы-пружины-демпфера, таким образом, выдает высокую вибрацию 7 Гц, хотя входная сила имеет относительно низкую гармонику 7 Гц. Этот пример подчеркивает, что результирующая вибрация зависит как от функции принуждения, так и от системы, к которой прикладывается сила.
На рисунке также показано представление результирующей вибрации во временной области. Это делается путем выполнения обратного преобразования Фурье, которое преобразует данные частотной области во временную область. На практике это делается редко, потому что частотный спектр предоставляет всю необходимую информацию.
Функция частотной характеристики (FRF) не обязательно должна быть рассчитана на основе данных о массе, демпфировании и жесткости системы, но может быть измерена экспериментально. Например, если применяется известная сила в диапазоне частот и если соответствующие вибрации измеряются, функция частотной характеристики может быть вычислена, таким образом характеризуя систему. Этот метод используется в области экспериментальных модальный анализ для определения вибрационных характеристик конструкции.
Системы с множеством степеней свободы и формы колебаний

Простая модель масса-пружина-демпфер является основой анализа вибрации, но как насчет более сложных систем? Описанная выше модель масса-пружина-демпфер называется одиночной степень свободы (SDOF), поскольку предполагается, что масса движется только вверх и вниз. В более сложных системах система должна быть разбита на несколько масс, которые движутся более чем в одном направлении, добавляя степени свободы. Основные концепции множественных степеней свободы (MDOF) можно понять, взглянув на модель с двумя степенями свободы, как показано на рисунке.
Уравнения движения системы 2DOF имеют следующий вид:


Это можно переписать в матрица формат:

Более компактная форма этого матричного уравнения может быть записана как:

куда и находятся симметричные матрицы называемые соответственно матрицами массы, демпфирования и жесткости. Матрицы представляют собой квадратные матрицы размером NxN, где N - количество степеней свободы системы.



Следующий анализ включает случай, когда нет демпфирования и приложенных сил (то есть свободной вибрации). Решение вязкозатухающей системы несколько сложнее.[9]

Это дифференциальное уравнение можно решить, если принять следующий тип решения:

Примечание: используя экспоненциальное решение математический прием, используемый для решения линейных дифференциальных уравнений. С помощью Формула Эйлера и взяв только действительную часть решения, это то же косинусное решение для системы с 1 степенью свободы. Экспоненциальное решение используется только потому, что им легче манипулировать математически.

Тогда уравнение станет:

С не может равняться нулю, уравнение сводится к следующему.


Проблема собственных значений
Это называется собственное значение задача по математике и может быть оформлена в стандартном формате, предварительно умножив уравнение на


и если: и



Решение проблемы приводит к N собственные значения (т.е. ), где N соответствует числу степеней свободы. Собственные значения обеспечивают собственные частоты системы. Когда эти собственные значения подставляются обратно в исходную систему уравнений, значения соответствующие каждому собственному значению, называются собственные векторы. Эти собственные векторы представляют собой формы колебаний системы. Решение задачи на собственные значения может быть довольно громоздким (особенно для задач со многими степенями свободы), но, к счастью, в большинстве программ математического анализа есть процедуры для собственных значений.


Собственные значения и собственные векторы часто записываются в следующем матричном формате и описывают модальную модель системы:

Простой пример с использованием модели с двумя степенями свободы может помочь проиллюстрировать концепции. Пусть обе массы имеют массу 1 кг, а жесткость всех трех пружин равна 1000 Н / м. Матрица массы и жесткости для этой задачи:
- и


потом

Собственные значения для этой задачи, задаваемые программой для собственных значений:

Тогда собственные частоты в герцах равны (вспоминая ) и



Две формы колебаний для соответствующих собственных частот представлены как:

Поскольку система представляет собой систему с 2 степенями свободы, существует два режима с соответствующими собственными частотами и формами. Векторы формы колебаний не являются абсолютным движением, а просто описывают относительное движение степеней свободы. В нашем случае первый вектор формы моды говорит о том, что массы движутся вместе в фазе, поскольку они имеют одинаковое значение и знак. В случае вектора второй формы моды каждая масса движется в противоположном направлении с одинаковой скоростью.
Иллюстрация проблемы с несколькими степенями свободы
Когда существует много степеней свободы, одним из методов визуализации форм колебаний является их анимация с помощью программного обеспечения для расчета конструкций, такого как Femap, ANSYS или VA One - пользователем Группа ESI. Пример форм режима анимации показан на рисунке ниже для консольный я-луч как показано с использованием модальный анализ на ANSYS. В этом случае метод конечных элементов был использован для создания аппроксимации матриц массы и жесткости путем создания сетки для интересующего объекта с целью решения дискретная задача на собственные значения. Обратите внимание, что в этом случае метод конечных элементов обеспечивает аппроксимацию сетчатой поверхности (для которой существует бесконечное количество режимов и частот колебаний). Следовательно, эта относительно простая модель, которая имеет более 100 степеней свободы и, следовательно, столько собственных частот и форм колебаний, обеспечивает хорошее приближение для первых собственных частот и мод.†. Как правило, для практического применения важны только первые несколько режимов.
| В этой таблице первая и вторая (верхняя и нижняя соответственно) горизонтальный изгиб (оставили), крутильный (в центре) и вертикальный изгибные (правые) колебательные моды я-луч визуализируются. Существуют также другие виды колебаний, в которых луч сжатый /растянутый по высоте, ширине и длине соответственно. | ||
| Форма колебаний консольной двутавровой балки | ||
|---|---|---|
 |  |  |
 |  |  |
^ Обратите внимание, что при выполнении численной аппроксимации любой математической модели необходимо убедиться в сходимости интересующих параметров.
Проблема с несколькими степенями свободы преобразована в проблему с одной степенью свободы
Собственные векторы обладают очень важными свойствами, называемыми свойствами ортогональности. Эти свойства можно использовать для значительного упрощения решения моделей с несколькими степенями свободы. Можно показать, что собственные векторы обладают следующими свойствами:


и находятся диагональные матрицы которые содержат модальные значения массы и жесткости для каждого из режимов. (Примечание: поскольку собственные векторы (формы колебаний) можно масштабировать произвольно, свойства ортогональности часто используются для масштабирования собственных векторов, поэтому значение модальной массы для каждой моды равно 1. Таким образом, матрица модальных масс является единичная матрица )


Эти свойства можно использовать для значительного упрощения решения моделей с несколькими степенями свободы путем выполнения следующего преобразования координат.

Использование этого преобразования координат в исходном дифференциальном уравнении свободных колебаний приводит к следующему уравнению.

Воспользовавшись свойствами ортогональности, умножив это уравнение на


Свойства ортогональности затем упрощают это уравнение до:

Это уравнение является основой анализа вибрации для систем с несколькими степенями свободы. Аналогичный результат можно получить для систем с демпфированием.[9] Ключевым моментом является то, что модальные матрицы массы и жесткости являются диагональными матрицами, и поэтому уравнения были «развязаны». Другими словами, проблема была преобразована из большой громоздкой задачи с множественными степенями свободы во множество задач с одной степенью свободы, которые могут быть решены с использованием тех же методов, описанных выше.
Решение для Икс заменяется решением для q, называемые модальными координатами или факторами модального участия.
Может быть яснее понять, если записывается как:


В таком виде можно увидеть, что вибрация на каждой из степеней свободы - это просто линейная сумма форм колебаний. Кроме того, степень "участия" каждой моды в окончательной вибрации определяется q, ее коэффициентом модального участия.
Режим жесткого тела
Безудержная система с несколькими степенями свободы испытывает как поступательное движение твердого тела, так и / или вращение и вибрацию. Наличие режима твердого тела приводит к нулевой собственной частоте. Соответствующая форма моды называется режимом твердого тела.
Смотрите также
- Акустическая инженерия
- Антивибрационный состав
- Балансировочная машина
- Базовая изоляция
- Амортизация
- Критическая скорость
- Демпфирование
- Метод Дункерли
- Землетрясение
- Эластичный маятник
- Быстрое преобразование Фурье
- Машиностроение
- Механический резонанс
- Модальный анализ
- Форма моды
- Шум и вибрация на морских судах
- Шум, вибрация и резкость
- Палестезия
- Пассивная компенсация вертикальной качки
- Маятник
- Квантовая вибрация
- Случайная вибрация
- Качество езды
- Фактор Рэлея в анализе колебаний
- Шейкер (испытательное устройство)
- Шок
- Регистратор данных ударов и вибрации
- Простой гармонический осциллятор
- Звук
- Структурная акустика
- Структурная динамика
- Баланс шин
- Крутильные колебания
- Настроенный массовый демпфер
- Калибратор вибрации
- Контроль вибрации
- Виброизоляция
- Волна
- Вибрация всего тела
Рекомендации
- ^ Тастин, Уэйн. Где разместить контрольный акселерометр: одно из самых важных решений при разработке испытаний на случайную вибрацию также является наиболее игнорируемым, EE-Evaluation Engineering, 2006 г.
- ^ «Политек InFocus 1/2007» (PDF).
- ^ Тони Араужо. Эволюция автомобильной фиксации вибрации, EE-Evaluation Engineering, 2019 г.
- ^ а б Бланкс, Х.С., "Методы эквивалентности для испытаний на вибрацию", Примечания SVIC, стр. 17.
- ^ Кроуфорд, искусство; Упрощенное руководство по анализу вибрации
- ^ Эшлеман, Р. 1999, Основные вибрации оборудования: введение в испытания, анализ и мониторинг машин.
- ^ Институт Мебиуса; Категория 2 по анализу вибрации - Примечания к курсу 2013 г.
- ^ Симионеску, П.А. (2014). Инструменты компьютерного построения графиков и моделирования для пользователей AutoCAD (1-е изд.). Бока-Ратон, Флорида: CRC Press. ISBN 978-1-4822-5290-3.
- ^ а б Майя, Сильва. Теоретический и экспериментальный модальный анализ, Research Studies Press Ltd., 1997 г., ISBN 0-471-97067-0
дальнейшее чтение
- Язык, Бенсон, Принципы вибрации, Oxford University Press, 2001 г., ISBN 0-19-514246-2
- Инман, Дэниел Дж., Инженерная вибрация, Прентис Холл, 2001 г., ISBN 0-13-726142-X
- Томпсон, W.T., Теория колебаний, Nelson Thornes Ltd, 1996 г., ISBN 0-412-78390-8
- Хартог, Ден, Механические колебания, Dover Publications, 1985, ISBN 0-486-64785-4
- Рейнольдс, Дуглас Д. (2016). Инженерные принципы механической вибрации (4-е изд.). Блумингтон, Индиана, США: издательство Trafford On Demand Publishing. п. 485. ISBN 978-1490714370.
- [1]
- Институт профессиональной безопасности и здоровья Немецкого социального страхования от несчастных случаев: Вибрация всего тела и рук.