Дифференциальная геометрия поверхностей - Differential geometry of surfaces

В математика, то дифференциальная геометрия поверхностей имеет дело с дифференциальная геометрия из гладкий; плавный поверхности с различными дополнительными конструкциями, чаще всего Риманова метрика.Поверхности были тщательно изучены с разных точек зрения: внешне, относящиеся к их встраивание в Евклидово пространство и по сути, отражая их свойства, определяемые исключительно расстоянием внутри поверхности, измеренным по кривым на поверхности. Одна из фундаментальных исследуемых концепций - это Гауссова кривизна, впервые подробно изученный Карл Фридрих Гаусс,[1] который показал, что кривизна является внутренним свойством поверхности, независимым от ее изометрического вложения в евклидово пространство.
Поверхности естественно возникают как графики из функции пары переменные, а иногда появляются в параметрической форме или как места связаны с космические кривые. Важную роль в их исследовании сыграли Группы Ли (в духе Программа Эрланген ), а именно группы симметрии из Евклидова плоскость, то сфера и гиперболическая плоскость. Эти группы Ли можно использовать для описания поверхностей постоянной гауссовой кривизны; они также являются важным компонентом современного подхода к внутренней дифференциальной геометрии через связи. С другой стороны, внешние свойства, основанные на вложении поверхности в евклидово пространство, также широко изучаются. Это хорошо иллюстрирует нелинейная Уравнения Эйлера – Лагранжа. в вариационное исчисление: хотя Эйлер разработал уравнения с одной переменной, чтобы понять геодезические, определенных независимо от вложения, одно из основных приложений Лагранжа двух уравнений с переменными было минимальные поверхности, концепция, которая может быть определена только в терминах вложения.
История

Объемы некоторых квадратичные поверхности из революция были рассчитаны Архимед.[2] Развитие исчисление в семнадцатом веке предоставил более систематический способ их вычисления.[3] Кривизна общих поверхностей впервые была изучена Эйлер. В 1760 г.[4] он доказал формулу кривизны плоского сечения поверхности и в 1771 г.[5] он рассматривал поверхности, представленные в параметрической форме. Monge заложил основы своей теории в своих классических мемуарах L'application de l'analyse à la géometrie появившаяся в 1795 г. Определяющий вклад в теорию поверхностей внесен Гаусс в двух замечательных статьях 1825 и 1827 гг.[1] Это ознаменовало новый отход от традиции, потому что Гаусс впервые рассмотрел внутренний геометрия поверхности, свойства которой определяются только геодезическими расстояниями между точками на поверхности независимо от того, каким образом поверхность расположена в окружающем евклидовом пространстве. Венчающий результат, Теорема Egregium Гаусса установил, что Гауссова кривизна является внутренним инвариантом, т.е. инвариантным относительно локальных изометрии. Эта точка зрения была распространена на многомерные пространства Риман и привело к тому, что сегодня известно как Риманова геометрия. Девятнадцатый век был золотым веком теории поверхностей как с топологической, так и с дифференциально-геометрической точки зрения, и большинство ведущих геометров посвятили себя их изучению.[нужна цитата ] Дарбу собрал много результатов в своем четырехтомном трактате Теория поверхностей (1887–1896).
Обзор
Интуитивно довольно знакомо сказать, что лист растения, поверхность стекла или форма лица имеют определенные изгибы, и что все эти формы, даже без учета каких-либо отличительных знаков, имеют определенные геометрические формы. особенности, которые отличают одно от другого. Дифференциальная геометрия поверхностей занимается математическим пониманием таких явлений. Изучение этой области, которое в современной форме было начато в 1700-х годах, привело к развитию многомерной и абстрактной геометрии, такой как Риманова геометрия и общая теория относительности.[оригинальное исследование? ]
Существенный математический объект - объект регулярная поверхность. Хотя соглашения различаются по точному определению, они образуют общий класс подмножеств трехмерных Евклидово пространство (ℝ3), которые отражают часть знакомого понятия «поверхность». Анализируя класс кривых, лежащих на такой поверхности, и степень, в которой эти поверхности заставляют их изгибаться в ℝ3, каждой точке поверхности можно сопоставить два числа, называемых основные искривления. Их среднее значение называется средняя кривизна поверхности, а их продукт называется Гауссова кривизна.
Есть много классических примеров регулярных поверхностей, в том числе:
- знакомые примеры, такие как плоскости, цилиндры и сферы
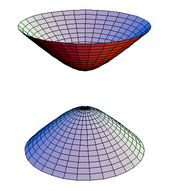
- минимальные поверхности, которые определяются тем свойством, что их средняя кривизна равна нулю в каждой точке. Наиболее известные примеры: катеноиды и геликоиды, хотя было обнаружено гораздо больше. Минимальные поверхности также могут быть определены свойствами, связанными с площадь поверхности, в результате чего они обеспечивают математическую модель формы мыльные фильмы при натяжении на проволочный каркас
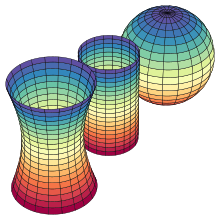
- линейчатые поверхности, которые представляют собой поверхности, через каждую точку которых проходит хотя бы одна прямая линия; примеры включают цилиндр и гиперболоид одного листа.
Удивительный результат Карл Фридрих Гаусс, известный как теорема эгрегиум, показали, что гауссова кривизна поверхности, которая по своему определению связана с тем, как кривые на поверхности меняют направление в трехмерном пространстве, на самом деле может быть измерена длинами кривых, лежащих на поверхностях вместе с углами, образованными при двух кривые на поверхности пересекаются. Терминологически это говорит о том, что гауссова кривизна может быть вычислена из первая фундаментальная форма (также называется метрический тензор ) поверхности. В вторая основная форма, напротив, это объект, который кодирует, как длина и углы кривых на поверхности искажаются, когда кривые отталкиваются от поверхности.
Несмотря на измерения различных аспектов длины и угла, первая и вторая основные формы не являются независимыми друг от друга и удовлетворяют определенным ограничениям, называемым Уравнения Гаусса-Кодацци. Основная теорема, часто называемая фундаментальной теоремой дифференциальной геометрии поверхностей, утверждает, что всякий раз, когда два объекта удовлетворяют ограничениям Гаусса-Кодацци, они возникают как первая и вторая фундаментальные формы регулярной поверхности.
Используя первую фундаментальную форму, можно определять новые объекты на регулярной поверхности. Геодезические кривые на поверхности, удовлетворяющие некоторому обыкновенное дифференциальное уравнение что определяется первой фундаментальной формой. Они очень напрямую связаны с изучением длин кривых; геодезическая достаточно короткой длины всегда будет кривой самый короткий длина на поверхности, которая соединяет две его конечные точки. Таким образом, геодезические являются фундаментальными для задачи оптимизации определения кратчайшего пути между двумя заданными точками на регулярной поверхности.
Можно также определить параллельный транспорт вдоль любой данной кривой, что дает рецепт, как деформировать касательный вектор к поверхности в одной точке кривой до касательных векторов во всех других точках кривой. Рецепт определяется по первому порядку. обыкновенное дифференциальное уравнение что определяется первой фундаментальной формой.
Вышеупомянутые концепции, по сути, все связаны с многомерным исчислением. В Теорема Гаусса-Бонне является более глобальным результатом, который связывает гауссову кривизну поверхности с ее топологическим типом. Он утверждает, что среднее значение гауссовой кривизны полностью определяется Эйлерова характеристика поверхности вместе с ее площадью поверхности.
Понятие Риманово многообразие и Риманова поверхность являются двумя обобщениями обсуждаемых выше регулярных поверхностей. В частности, практически вся обсуждаемая здесь теория регулярных поверхностей имеет обобщение в теории римановых многообразий. Это не так для римановых поверхностей, хотя каждая регулярная поверхность является примером римановой поверхности.
Регулярные поверхности в евклидовом пространстве
Определение
Интуитивно понятно, что сфера гладкая, а конус или пирамида из-за их вершины или ребер - нет. Понятие «регулярная поверхность» является формализацией понятия гладкой поверхности. Определение использует локальное представление поверхности через карты между Евклидовы пространства. Для таких отображений существует стандартное понятие гладкости; отображение между двумя открытыми подмножествами евклидова пространства является гладким, если его частные производные любого порядка существуют в каждой точке области.[6][7][8]
Ниже приведены три эквивалентных способа представления определения; среднее определение, пожалуй, наиболее интуитивно понятное, поскольку в нем говорится, что обычная поверхность - это подмножество ℝ3 который локально является графиком гладкой функции (будь то над областью в yz самолет, xz самолет, или ху самолет).

| Объекты, используемые в определении | Регулярная поверхность в евклидовом пространстве ℝ3 это подмножество S из ℝ3 так что каждая точка S имеет... |
|---|---|
| Локальные параметризации | ... открытый район U ⊂ S для которого есть открытое подмножество V из ℝ2 и гомеоморфизм ж : V → U такой, что
|
| Патчи Monge | ... открытый район U ⊂ ℝ3 для которого есть открытое подмножество V из ℝ2 и гладкая функция час : V → ℝ такое, что выполняется одно из следующих условий:
|
| Неявные функции | ... открытый район U ⊂ ℝ3 для которого существует гладкая функция F : U → ℝ с:
|
Гомеоморфизмы, появляющиеся в первом определении, известны как локальные параметризации или местные системы координат или местные диаграммы на S.[13] Эквивалентность первых двух определений утверждает, что вокруг любой точки на регулярной поверхности всегда существуют локальные параметризации вида (ты, v) ↦ (час(ты, v), ты, v), (ты, v) ↦ (ты, час(ты, v), v), или (ты, v) ↦ (ты, v, час(ты, v)), известный как Патчи Монжа. Функции F как в третьем определении называются локальные определяющие функции. Эквивалентность всех трех определений следует из теорема о неявной функции.[14][15][16]
Для любых двух локальных параметризаций ж : V → U и ж ′ : V ′→ U ′ регулярной поверхности состав ж −1 ∘ ж ′ обязательно гладко как отображение между открытыми подмножествами ℝ2.[17] Это показывает, что любая регулярная поверхность естественным образом имеет структуру гладкое многообразие, с гладким атласом, задаваемым обратными локальными параметризациями.
В классической теории дифференциальной геометрии поверхности обычно изучаются только в регулярном случае.[18][19] Однако также распространено изучение нерегулярных поверхностей, на которых две частные производные ∂ты ж и ∂v ж локальной параметризации может не быть линейно независимый. В таком случае, S могут иметь особенности, такие как куспидальные края. Такие поверхности обычно изучаются в теория сингулярности. Другие ослабленные формы правильных поверхностей встречаются в системы автоматизированного проектирования, где поверхность разбита на непересекающиеся части, а производные от локальных параметризаций не могут быть даже непрерывными по границам.[нужна цитата ]
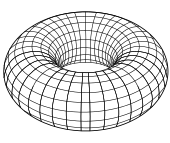

Простые примеры. Простой пример регулярной поверхности - двумерная сфера {(Икс, у, z) | Икс2 + у2 + z2 = 1}; эта поверхность может быть покрыта шестью пятнами Монжа (по два каждого из трех типов, указанных выше), принимая час(ты, v) = ± (1 − ты2 − v2)1/2. Его также можно покрыть двумя локальными параметризациями, используя стереографическая проекция. Набор {(Икс, у, z) : ((Икс2 + у2)1/2 − р)2 + z2 = р2} это тор революции с радиусами р и р. Это обычная поверхность; локальные параметризации можно представить в виде

В гиперболоид на двух листах {(Икс, у, z) : z2 = 1 + Икс2 + у2} - регулярная поверхность; он может быть покрыт двумя заплатками Monge, с час(ты, v) = ±(1 + ты2 + v2)1/2. В геликоид появляется в теории минимальные поверхности. Он покрывается единственной локальной параметризацией, ж(ты, v) = (ты грех v, ты потому что v, v).
Касательные векторы и нормальные векторы
Позволять S быть регулярной поверхностью в ℝ3, и разреши п быть элементом S. Используя любое из приведенных выше определений, можно выделить определенные векторы в ℝ3 как касающийся S в п, а некоторые векторы в ℝ3 как ортогональный S в п.
| Объекты, используемые в определении | Вектор Икс в ℝ3 касается S в п если... | Вектор п в ℝ3 нормально для S в п если... |
|---|---|---|
| Локальные параметризации | ... с учетом любой локальной параметризации ж : V → S с участием п ∈ ж(V), Икс является линейной комбинацией и | ... он ортогонален каждому касательному вектору к S в п |
| Патчи Monge | ... для любого патча Monge (ты, v) ↦ (ты, v, час(ты, v)) чей ассортимент включает п, надо с частными производными, оцененными в точке (п1, п2). Аналогичное определение применимо к заплатам Монжа двух других форм. | ... для любого патча Monge (ты, v) ↦ (ты, v, час(ты, v)) чей ассортимент включает п, п кратно (∂час/∂ты, ∂час/∂v, −1) как оценивается в момент (п1, п2). Аналогичное определение применимо к заплатам Монжа двух других форм. |
| Неявные функции | ... для любой локальной определяющей функции F чей домен содержит п, Икс ортогонален ∇F(п) | ... для любой локальной определяющей функции F чей домен содержит п, п кратно ∇F(п) |



Видно, что касательное пространство к S в п, который определяется как состоящий из всех касательных векторов к S в п, является двумерным линейным подпространством ℝ3; это часто обозначается как ТпS. В нормальное пространство к S в п, который определяется как состоящий из всех нормальных векторов к S в п, - одномерное линейное подпространство ℝ3 которое ортогонально касательному пространству ТпS. Таким образом, в каждой точке п из S, есть два нормальных вектора единичной длины, называемые единичные нормальные векторы. Полезно отметить, что единичные векторы нормали в п могут быть заданы в терминах локальной параметризации, патчей Монжа или локальных определяющих функций с помощью формул

используя те же обозначения, что и в предыдущих определениях.
Также полезно отметить «внутреннее» определение касательных векторов, которое типично для обобщения теории регулярных поверхностей на случай гладкие многообразия. Он определяет касательное пространство как абстрактное двумерное реальное векторное пространство, а не как линейное подпространство ℝ3. В этом определении говорится, что касательный вектор к S в п - присвоение каждой локальной параметризации ж : V → S с участием п ∈ ж(V), из двух чисел Икс1 и Икс2, что для любой другой локальной параметризации ж ′ : V → S с участием п ∈ ж(V) (и с соответствующими номерами (Икс ′)1 и (Икс ′)2), надо

где Аж ′(п) это Матрица якобиана картографии ж −1 ∘ ж ′, оценивается в точке ж ′(п). Набор касательных векторов к S в п естественно имеет структуру двумерного векторного пространства. Касательный вектор в этом смысле соответствует касательному вектору в предыдущем смысле при рассмотрении вектора

в ℝ3. Условие Якоби на Икс1 и Икс2 обеспечивает Правило цепи, что этот вектор не зависит от ж.
Для гладких функций на поверхности векторные поля (то есть касательные векторные поля) имеют важную интерпретацию как операторы или производные первого порядка. Позволять быть регулярной поверхностью, открытое подмножество плоскости и координатная диаграмма. Если , космос можно отождествить с . так же определяет векторные поля на с векторными полями на . Принимая стандартные переменные ты и v, векторное поле имеет вид , с участием а и б гладкие функции. Если - векторное поле и - гладкая функция, то также является гладкой функцией. Дифференциальный оператор первого порядка это происхождение, т.е. удовлетворяет правилу Лейбница [20]













Для векторных полей Икс и Y просто проверить, что оператор - вывод, соответствующий векторному полю. Это называется Кронштейн лжи . Это кососимметричный и удовлетворяет тождеству Якоби:
![{ displaystyle [X, Y] = XY-YX}](https://wikimedia.org/api/rest_v1/media/math/render/svg/838f73010b4f791eeaf245317fb4b6e07c45d741)
![[X, Y]](https://wikimedia.org/api/rest_v1/media/math/render/svg/94470b44d283fde62130212956058ca6b727da37)
![{ displaystyle [X, Y] = - [Y, X]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c433e248c0c7e659ef3f2d9df64d8c7505630bc)
![{ displaystyle [[X, Y], Z] + [[Y, Z], X] + [[Z, X], Y] = 0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a4d5d5018bd0a276d74259b92a5403824cd982e7)
Таким образом, векторные поля на или сформировать Алгебра Ли под скобкой Ли.[21]
Первая и вторая основные формы, оператор формы и кривизна
Позволять S быть регулярной поверхностью в ℝ3. Учитывая локальную параметризацию ж : V → S и единичное нормальное векторное поле п к ж(V), каждый определяет следующие объекты как функции с действительными или матричными значениями на V. Первая фундаментальная форма зависит только от ж, а не на п. В четвертом столбце указано, каким образом эти функции зависят от ж, связывая функции E ′, F ′, г ′, L ′, и т. д., возникающие при другом выборе локальной параметризации, ж ′ : V ′ → S, тем, кто возникает для ж. Вот А обозначает Матрица якобиана из ж –1 ∘ ж ′. Ключевое соотношение в установлении формул четвертого столбца тогда

как следует из Правило цепи.
| Терминология | Обозначение | Определение | Зависимость от локальной параметризации |
|---|---|---|---|
| Первая фундаментальная форма | E | ||
| F | |||
| г | |||
| Вторая фундаментальная форма | L | ||
| M | |||
| N | |||
| Оператор формы[22] | п | ||
| Гауссова кривизна | K | ||
| Средняя кривизна | ЧАС | ||
| Основные искривления |

















Путем прямого вычисления с матрицей, определяющей оператор формы, можно проверить, что гауссова кривизна равна детерминант оператора формы, средняя кривизна - это след оператора формы, а главными кривизнами являются собственные значения оператора формы; кроме того, гауссова кривизна - это произведение главных кривизн, а средняя кривизна - их сумма. Эти наблюдения также можно сформулировать как определения этих объектов. Эти наблюдения также показывают, что последние три строки четвертого столбца следуют сразу за предыдущей строкой, так как аналогичные матрицы имеют идентичные определитель, след и собственные значения. Важно отметить E, г, и НАПРИМЕР − F2 все обязательно положительные. Это гарантирует, что матрица, обратная в определении оператора формы, хорошо определена, и что главные кривизны являются действительными числами.
Также обратите внимание, что отрицание выбора единичного нормального векторного поля отрицает вторую фундаментальную форму, оператор формы, среднюю кривизну и главные кривизны, но оставит гауссову кривизну неизменной. Таким образом, это показало, что при регулярной поверхности S, гауссова кривизна S можно рассматривать как действительную функцию на S; относительно выбора единичного нормального векторного поля на всех Sдве главные кривизны и средняя кривизна также являются действительными функциями на S.


Геометрически первую и вторую фундаментальные формы можно рассматривать как информацию о том, как ж(ты, v) движется в ℝ3 так как (ты, v) движется в V. В частности, первая фундаментальная форма кодирует, насколько быстро ж движется, в то время как вторая фундаментальная форма кодирует степень, в которой его движение происходит в направлении вектора нормали п. Другими словами, вторая фундаментальная форма в точке п кодирует длину ортогональной проекции из S к касательной плоскости к S в п; в частности, он дает квадратичную функцию, которая наилучшим образом приближает эту длину. Это мышление можно уточнить с помощью формул

как следует непосредственно из определений основных форм и Теорема Тейлора в двух измерениях. Основные кривизны можно увидеть следующим образом. В данный момент п из S, рассмотрим совокупность всех плоскостей, содержащих прямую, ортогональную к S. Каждая такая плоскость имеет кривую пересечения с S, который можно рассматривать как плоская кривая внутри самого самолета. Две основные кривизны при п - максимальное и минимальное возможные значения кривизны этой плоской кривой при п, поскольку рассматриваемая плоскость вращается вокруг нормали.
Ниже приводится сводка расчетов вышеуказанных количеств относительно пластыря Монжа. ж(ты, v) = (ты, v, час(ты, v)). Вот часты и часv обозначим две частные производные от час, с аналогичными обозначениями для вторых частных производных. Вторая фундаментальная форма и все последующие величины вычисляются относительно данного выбора единичного нормального векторного поля.
| Количество | Формула |
|---|---|
| Единичное нормальное векторное поле | |
| Первая фундаментальная форма | |
| Вторая фундаментальная форма | |
| Оператор формы | |
| Гауссова кривизна | |
| Средняя кривизна |






Символы Кристоффеля, уравнения Гаусса – Кодацци и теорема Egregium.
Позволять S быть регулярной поверхностью в ℝ3. В Символы Кристоффеля назначить каждой локальной параметризации ж : V → S, восемь функций на V, определяется[23]

Их также можно определить следующими формулами, в которых п является единичным нормальным векторным полем вдоль ж(V) и L, M, N - соответствующие компоненты второй фундаментальной формы:

Ключ к этому определению заключается в том, что ∂ж/∂ты, ∂ж/∂v, и п составляют основу ℝ3 в каждой точке, относительно которой каждое из трех уравнений однозначно определяет символы Кристоффеля как координаты вторых частных производных ж. Выбор единицы измерения не влияет на символы Кристоффеля, поскольку если п заменяется на его отрицание, то компоненты второй фундаментальной формы также отрицаются, и поэтому знаки Ln, Mn, Nn остаются без изменений.
Второе определение показывает, в контексте локальной параметризации, что символы Кристоффеля геометрически естественны. Хотя формулы в первом определении кажутся менее естественными, они важны для демонстрации того, что символы Кристоффеля могут быть вычислены из первой фундаментальной формы, что не сразу видно из второго определения. Эквивалентность определений можно проверить, напрямую подставив первое определение во второе и используя определения E, F, г.
В Уравнения Кодацци утверждать, что[24]

Эти уравнения могут быть непосредственно выведены из второго определения символов Кристоффеля, приведенного выше; например, первое уравнение Кодацци получается дифференцированием первого уравнения относительно v, второе уравнение относительно ты, вычитая два и взяв скалярное произведение с п. В Уравнение Гаусса утверждает, что[25]

Они могут быть выведены аналогично уравнениям Кодацци с использованием уравнения Уравнения Вейнгартена вместо скалярного произведения с п. Хотя они записаны как три отдельных уравнения, они идентичны, если подставить определения символов Кристоффеля в терминах первой фундаментальной формы. Есть много способов записать получившееся выражение, один из которых был получен в 1852 г. Brioschi с умелым использованием детерминант:[26][27]

Когда символы Кристоффеля рассматриваются как определяемые первой фундаментальной формой, уравнения Гаусса и Кодацци представляют определенные ограничения между первой и второй фундаментальными формами. Уравнение Гаусса заслуживает особого внимания, поскольку оно показывает, что кривизна Гаусса может быть вычислена непосредственно из первой фундаментальной формы без необходимости в какой-либо другой информации; эквивалентно, это говорит, что LN − M2 действительно может быть записано как функция E, F, г, хотя отдельные компоненты L, M, N не можешь. Это известно как теорема эгрегиум, и было крупным открытием Карл Фридрих Гаусс. Это особенно поразительно, если вспомнить геометрическое определение гауссовой кривизны S как определяемые максимальным и минимальным радиусами соприкасающихся кругов; они кажутся фундаментально определяемыми геометрией того, как S сгибается внутри ℝ3. Тем не менее теорема показывает, что их произведение может быть определено из "внутренней" геометрии S, имея дело только с длинами кривых вдоль S и углы, образованные при их пересечении. Как сказал Марсель Бергер:[28]
Эта теорема сбивает с толку. [...] Это такая теорема, которая могла бы подождать еще несколько десятков лет, прежде чем ее обнаружит другой математик, поскольку, в отличие от значительной части интеллектуальной истории, она абсолютно не витала в воздухе. [...] Насколько нам известно, сегодня не существует простого геометрического доказательства теоремы эгрегиум.
Уравнения Гаусса-Кодацци также могут быть лаконично выраженный и производный на языке формы подключения из-за Эли Картан.[29] На языке тензорное исчисление, используя естественные показатели и связи на тензорные пучки, уравнение Гаусса можно записать как ЧАС2 − |час|2 = р и два уравнения Кодацци могут быть записаны как ∇1 час12 = ∇2 час11 и ∇1 час22 = ∇2 час12; сложные выражения, связанные с символами Кристоффеля и первой фундаментальной формой, полностью поглощаются определениями ковариантной тензорной производной ∇час и скалярная кривизна р. Пьер Бонне доказал, что две квадратичные формы, удовлетворяющие уравнениям Гаусса-Кодацци, всегда однозначно определяют вложенную поверхность локально.[30] По этой причине уравнения Гаусса-Кодацци часто называют фундаментальными уравнениями для вложенных поверхностей, точно определяя, откуда берутся внутренняя и внешняя кривизна. Они допускают обобщения на поверхности, вложенные в более общие Римановы многообразия.
Изометрии
Диффеоморфизм между открытыми наборами и на обычной поверхности считается изометрия если он сохраняет метрику, т.е. первую фундаментальную форму.[31][32][33] Таким образом, для каждой точки в и касательные векторы в , есть равенства




С точки зрения внутреннего продукта, происходящего из первой фундаментальной формы, это можно переписать как
- .


С другой стороны, длина параметризованной кривой можно рассчитать как


и, если кривая лежит в , правила замены переменных показывают, что

И наоборот, если сохраняет длины всех параметризованных кривых, тогда это изометрия. Действительно для подходящего выбора , касательные векторы и дать произвольные касательные векторы и . Равенства должны выполняться при любом выборе касательных векторов и а также и , так что .[34]








Простой пример изометрии дается двумя параметризациями и открытого набора на регулярные поверхности и . Если , и , тогда является изометрией на .[35]










Цилиндр и плоскость являются примерами поверхностей, которые являются локально изометрическими, но которые не могут быть расширены до изометрии по топологическим причинам.[36] Другой пример: катеноид и геликоид локально изометричны.[37]
Ковариантные производные
Эта секция не цитировать Любые источники. (Август 2020 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
А тангенциальное векторное поле Икс на S назначает, каждому п в S, касательный вектор Иксп к S в п. Согласно "внутреннему" определению касательных векторов, данному выше, касательное векторное поле Икс затем присваивает каждой локальной параметризации ж : V → S, две действительные функции Икс1 и Икс2 на V, так что

для каждого п в S. Один говорит, что Икс гладкая, если функции Икс1 и Икс2 гладкие, на любой выбор ж.[38] Согласно другим определениям касательных векторов, данным выше, можно также рассматривать касательное векторное поле Икс на S как карта Икс : S → ℝ3 такой, что Икс(п) содержится в касательном пространстве ТпS ⊂ ℝ3 для каждого п в S. Как это часто бывает в более общей ситуации гладкие многообразия, тангенциальные векторные поля также можно определить как некоторые дифференциальные операторы на пространстве гладких функций на S.
В ковариантные производные (также называемые "касательными производными") Туллио Леви-Чивита и Грегорио Риччи-Курбастро обеспечивают средства дифференцирования гладких тангенциальных векторных полей. Учитывая тангенциальное векторное поле Икс и касательный вектор Y к S в п, ковариантная производная ∇YИкс некоторый касательный вектор к S в п. Следовательно, если Икс и Y оба являются касательными векторными полями, то ∇YИкс также можно рассматривать как тангенциальное векторное поле; итеративно, если Икс, Y, и Z тангенциальные векторные поля, можно вычислить ∇Z∇YИкс, которое будет еще одним касательным векторным полем. Есть несколько способов определить ковариантную производную; в первом ниже используются символы Кристоффеля и «внутреннее» определение касательных векторов, а во втором - более явно геометрическая форма.
Учитывая тангенциальное векторное поле Икс и касательный вектор Y к S в п, один определяет ∇YИкс быть касательным вектором к п который приписывает локальной параметризации ж : V → S два числа

где D(Y1, Y2) это производная по направлению.[39] Это часто сокращается в менее громоздкой форме (∇YИкс)k = ∂Y(Икс k) + Y яΓk
ijИкс j, используя Обозначения Эйнштейна и с неявным пониманием местоположения оценки функции. Это следует за стандартный рецепт в Риманова геометрия для получения связь из Риманова метрика. Это фундаментальный факт, что вектор

в ℝ3 не зависит от выбора локальной параметризации ж, хотя это довольно утомительно проверять.
Также можно определить ковариантную производную с помощью следующего геометрического подхода, который не использует символы Кристоффеля или локальные параметризации.[40][41][42] Позволять Икс быть векторным полем на S, рассматриваемая как функция S → ℝ3. Для любой кривой c : (а, б) → S, можно рассматривать состав Икс ∘ c : (а, б) → ℝ3. Как карта между евклидовыми пространствами, его можно дифференцировать при любом входном значении, чтобы получить элемент (Икс ∘ c)′(т) из ℝ3. В ортогональная проекция этого вектора на Тc(т)S определяет ковариантную производную ∇c ′(т)Икс. Хотя это геометрически чистое определение, необходимо показать, что результат зависит только от c′(т) и Икс, а не на c и Икс; Для этого небольшого технического аргумента можно использовать локальные параметризации.
Из второго определения не сразу видно, что ковариантное дифференцирование зависит только от первой фундаментальной формы S; однако это непосредственно следует из первого определения, поскольку символы Кристоффеля могут быть определены непосредственно из первой фундаментальной формы. Несложно проверить эквивалентность этих двух определений. Ключ в том, что когда кто-то Икс1∂ж/∂ты + Икс2∂ж/∂v как ℝ3-значная функция, ее дифференцирование по кривой приводит к вторым частным производным ∂2ж; символы Кристоффеля входят с ортогональной проекцией в касательное пространство из-за формулировки символов Кристоффеля как тангенциальных компонентов вторых производных от ж относительно основы ∂ж/∂ты, ∂ж/∂v, п.[43] Это обсуждается в предыдущем разделе.
Правая часть трех уравнений Гаусса может быть выражена с помощью ковариантного дифференцирования. Например, правая часть

можно распознать как вторую координату

относительно основы ∂ж/∂ты, ∂ж/∂v, в чем можно непосредственно убедиться, используя определение ковариантного дифференцирования по символам Кристоффеля. На языке Риманова геометрия, это наблюдение можно также сформулировать как утверждение, что правые части уравнений Гаусса являются различными компонентами Кривизна Риччи из Леви-Чивита связь первой фундаментальной формы, когда интерпретируется как Риманова метрика.
Примеры

Поверхности революции
Поверхность вращения получается вращением кривой в xz-самолет о z-ось. К таким поверхностям относятся сферы, цилиндры, конусы, торы и катеноид. Генерал эллипсоиды, гиперболоиды, и параболоиды не. Предположим, что кривая параметризована

с участием s взятый из интервала (а, б). Если c1 никогда не равно нулю, если c1′ и c2′ никогда не равны нулю, и если c1 и c2 оба гладкие, то соответствующая поверхность вращения

будет регулярной поверхностью в ℝ3. Локальная параметризация ж : (а, б) × (0, 2π) → S дан кем-то

Относительно этой параметризации геометрические данные:[44]
| Количество | Формула |
|---|---|
| Единичное нормальное векторное поле | |
| Первая фундаментальная форма | |
| Вторая фундаментальная форма | |
| Основные искривления | |
| Гауссова кривизна | |
| Средняя кривизна |






В частном случае, когда исходная кривая параметризуется длиной дуги, т. Е. (c1′(s))2 + (c1′(s))2 = 1, можно дифференцировать, чтобы найти c1′(s)c1′′(s) + c2′(s)c2′′(s) = 0. При подстановке в гауссову кривизну получаем упрощенный

Простота этой формулы позволяет особенно легко изучить класс вращательно-симметричных поверхностей с постоянной гауссовой кривизной.[45] Приведением к альтернативному случаю, что c2(s) = s, можно изучать вращательно-симметричные минимальные поверхности, в результате чего любая такая поверхность является частью плоскости или масштабированного катеноида.[46]
Каждая константа-т кривая на S может быть параметризован как геодезический; постоянный-s кривая на S можно параметризовать как геодезическую тогда и только тогда, когда c1′ (S) равно нулю. Как правило, геодезические на S регулируются Отношение Клеро.

Квадрические поверхности
Рассмотрим квадратичную поверхность, заданную формулой[47]

Эта поверхность допускает параметризацию

Гауссова кривизна и средняя кривизна задаются формулами


Линейчатые поверхности
Линейчатая поверхность - это поверхность, которая может быть создана движением прямой линии в E3.[48] Выбор директриса на поверхности, т.е. плавная кривая единичной скорости c(т) перпендикулярно прямым, а затем выбирая ты(т) быть единичными векторами вдоль кривой в направлении линий, вектор скорости v = cт и ты удовлетворить

Поверхность состоит из точек

так как s и т варьироваться.
Тогда, если

гауссова и средняя кривизны даются как
![{ displaystyle K = - { beta ^ {2} over ((s- alpha) ^ {2} + beta ^ {2}) ^ {2}}, , , K_ {m} = - {r [(s- alpha) ^ {2} + beta ^ {2})] + beta _ {t} (s- alpha) + beta alpha _ {t} over [(s- alpha) ^ {2} + beta ^ {2}] ^ { frac {3} {2}}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ff1ab2130e1d570ae5585c216637fb7661847192)
Гауссова кривизна линейчатой поверхности равна нулю тогда и только тогда, когда тыт и v пропорциональны,[49] Это условие эквивалентно тому, что поверхность является конверт плоскостей вдоль кривой, содержащей касательный вектор v и ортогональный вектор ты, т.е. к поверхности развивающийся по кривой.[50] В более общем плане поверхность в E3 имеет исчезающую гауссову кривизну вблизи точки тогда и только тогда, когда она проявляется вблизи этой точки.[51] (Эквивалентное условие приводится ниже в терминах метрики.)
Минимальные поверхности
В 1760 г. Лагранж расширил результаты Эйлера о вариационное исчисление с участием интегралов от одной переменной до двух.[52] Он имел в виду следующую проблему:
Учитывая замкнутую кривую в E3, найдите поверхность с кривой в качестве границы с минимальной площадью.
Такая поверхность называется минимальная поверхность.
В 1776 г. Жан Батист Менье показал, что дифференциальное уравнение, полученное Лагранжем, эквивалентно обращению в нуль средней кривизны поверхности:
Поверхность минимальна тогда и только тогда, когда ее средняя кривизна равна нулю.
Минимальные поверхности имеют простую интерпретацию в реальной жизни: они представляют собой форму, которую примет мыльная пленка, если проволочный каркас, имеющий форму кривой, погрузить в мыльный раствор, а затем осторожно вынуть. Вопрос о том, существует ли минимальная поверхность с заданной границей, называется Проблема плато после бельгийского физика Плато Джозеф проводившие эксперименты над мыльными фильмами в середине девятнадцатого века. В 1930 г. Джесси Дуглас и Тибор Радо дал положительный ответ на проблему Плато (Дуглас был награжден одним из первых Медали Филдса за эту работу в 1936 г.).[53]
Явно известны многие явные примеры минимальной поверхности, такие как катеноид, то геликоид, то Поверхность Шерка и Эннепер поверхность. В этой области были проведены обширные исследования, кратко изложенные в Оссерман (2002). В частности, результат Оссермана показывает, что если минимальная поверхность неплоская, то ее образ при отображении Гаусса плотен в S2.
Поверхности постоянной гауссовой кривизны

Если поверхность имеет постоянную гауссову кривизну, она называется поверхность постоянной кривизны.[54]
- Единица сфера в E3 имеет постоянную гауссову кривизну +1.
- Евклидов самолет и цилиндр оба имеют постоянную гауссову кривизну 0.
- Поверхности вращения с φтт = φ имеют постоянную гауссову кривизну –1. Частные случаи получаются взятием φ(т) =C шиш т, C грех т и C eт.[55] Последний случай - классический псевдосфера генерируется вращением трактрикс вокруг центральной оси. В 1868 г. Эухенио Бельтрами показали, что геометрия псевдосферы напрямую связана с геометрией псевдосферы. гиперболическая плоскость, открытый независимо Лобачевский (1830 г.) и Бойяи (1832 г.). Уже в 1840 г. ученик Гаусса Ф. Миндинг получил тригонометрические формулы для псевдосферы, идентичные формулам для гиперболической плоскости.[56] Внутренняя геометрия этой поверхности теперь лучше понимается с точки зрения Метрика Пуанкаре на верхняя полуплоскость или единичный диск, и был описан другими моделями, такими как Модель Кляйна или модель гиперболоида, полученная при рассмотрении двуполостного гиперболоида q(Икс, у, z) = −1 в трехмерном Пространство Минковского, где q(Икс, у, z) = Икс2 + у2 – z2.[57]
Каждая из этих поверхностей постоянной кривизны имеет переходный Группа Ли симметрий. Этот теоретико-групповой факт имеет далеко идущие последствия, особенно из-за центральной роли, которую эти специальные поверхности играют в геометрии поверхностей. Пуанкаре с теорема униформизации (см. ниже).
Другие примеры поверхностей с гауссовой кривизной 0 включают шишки, касательные складывающиеся и вообще любая развертываемая поверхность.
Локальная метрическая структура
Для любой поверхности, вложенной в евклидово пространство размерности 3 или выше, можно измерить длину кривой на поверхности, угол между двумя кривыми и площадь области на поверхности. Эта структура кодируется бесконечно малым Риманова метрика на поверхности через линейные элементы и элементы площади. Классически в девятнадцатом и начале двадцатого веков только поверхности, встроенные в р3 были рассмотрены, и метрика была дана как 2 × 2 положительно определенная матрица плавно изменяющийся от точки к точке в локальной параметризации поверхности. Идея локальной параметризации и изменения координаты была позже формализована через современное абстрактное понятие многообразие, топологическое пространство, в котором гладкая структура дается местными картами на многообразии, точно так же, как планета Земля нанесена на карту атласы сегодня. Изменения координат между разными картами одного и того же региона должны быть плавными. Подобно тому, как контурные линии на реальных картах кодируют изменения высоты с учетом локальных искажений поверхности Земли для расчета истинных расстояний, так и риманова метрика описывает расстояния и площади «в малом» на каждой локальной карте. В каждой локальной карте риманова метрика задается гладким сопоставлением положительно определенной матрицы 2 × 2 каждой точке; когда берется другой график, матрица преобразуется в соответствии с Матрица якобиана изменения координаты. Тогда многообразие имеет структуру двумерного Риманово многообразие.
Оператор формы
В дифференциал дн из Карта Гаусса п может использоваться для определения типа внешней кривизны, известной как оператор формы[58] или Weingarten карта. Впервые этот оператор неявно появился в работе Вильгельм Блашке а позже явно в трактате Бурали-Форти и Бургати.[59] Поскольку в каждой точке Икс поверхности касательное пространство является внутреннее пространство продукта, оператор формы SИкс можно определить как линейный оператор на этом пространстве по формуле

для касательных векторов v, ш (внутренний продукт имеет смысл, потому что дн(v) и ш оба лежат в E3).[а] Правая часть симметрична относительно v и ш, поэтому оператор формы самосопряженный на касательном пространстве. Собственные значения SИкс просто основные искривления k1 и k2 в Икс. В частности детерминант оператора формы в точке - это гауссова кривизна, но она также содержит другую информацию, поскольку средняя кривизна половина след оператора формы. Средняя кривизна - внешний инвариант. Во внутренней геометрии цилиндр является разворачивающимся, что означает, что каждый его элемент неотличим от части плоскости, поскольку его кривизна Гаусса одинаково равна нулю. Однако его средняя кривизна не равна нулю; следовательно, внешне он отличается от самолета.
Эквивалентно, оператор формы может быть определен как линейный оператор в касательных пространствах, Sп: ТпM→ТпM. Если п единичное нормальное поле к M и v является касательным вектором, то

(нет стандартного соглашения, использовать ли + или - в определении).
В целом собственные векторы и собственные значения оператора формы в каждой точке определяют направления, в которых поверхность изгибается в каждой точке. Собственные значения соответствуют основные кривизны поверхности и собственные векторы являются соответствующими главными направлениями. Основные направления определяют направления, в которых кривая, встроенная в поверхность, должна двигаться, чтобы иметь максимальную и минимальную кривизну, которые задаются главными кривизнами.
Геодезические кривые на поверхности
Кривые на поверхности, которые минимизируют длину между конечными точками, называются геодезические; это форма, которая эластичный бинт протянутая между двумя точками займет. Математически они описываются с помощью обыкновенные дифференциальные уравнения и вариационное исчисление. Дифференциальная геометрия поверхностей вращается вокруг изучения геодезических. До сих пор остается открытым вопрос, возникает ли каждая риманова метрика на 2-мерной локальной карте из вложения в 3-мерное евклидово пространство: теория геодезических использовалась, чтобы показать, что это верно в важном случае, когда компоненты метрики находятся аналитический.
Геодезические
По кусочно-гладкому пути c(т) = (Икс(т), у(т)) в графике для т в [а, б], его длина определяется

и энергия от

Длина не зависит от параметризации пути. Посредством Уравнения Эйлера – Лагранжа., если c(т) - путь, минимизирующий длину, параметризованный длиной дуги, он должен удовлетворять Уравнения Эйлера


где Символы Кристоффеля Γk
ij даны

где г11 = E, г12 = F, г22 = г и гij матрица, обратная к гij. Путь, удовлетворяющий уравнениям Эйлера, называется геодезический. Посредством Неравенство Коши – Шварца путь, минимизирующий энергию, - это просто геодезическая, параметризованная длиной дуги; и для любой геодезической параметр т пропорциональна длине дуги.[60]
Геодезическая кривизна
В геодезическая кривизна kг в точке кривой c(т), параметризованная длиной дуги, на ориентированной поверхности определяется как[61]

где п(т) является "главной" единичной нормалью к кривой на поверхности, построенной путем вращения единичного касательного вектора ċ(т) на угол + 90 °.
- Геодезическая кривизна в точке - это внутренний инвариант, зависящий только от метрики вблизи точки.
- Кривая единичной скорости на поверхности является геодезической тогда и только тогда, когда ее геодезическая кривизна равна нулю во всех точках кривой.
- Кривая единичной скорости c(т) во вложенной поверхности является геодезической тогда и только тогда, когда ее вектор ускорения c̈(т) нормально к поверхности.
Геодезическая кривизна точно определяет, насколько кривая на поверхности отличается от геодезической.
Ортогональные координаты
Когда F = 0 по всей координатной карте, например, с геодезическими полярными координатами, обсуждаемыми ниже, изображения линий, параллельных Икс- и у-оси ортогональный и предоставить ортогональные координаты. Если ЧАС = (НАПРИМЕР)1⁄2, то гауссова кривизна определяется выражением[62]
![{ displaystyle K = - {1 over 2H} left [ partial _ {x} left ({ frac {G_ {x}} {H}} right) + partial _ {y} left ( { frac {E_ {y}} {H}} right) right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fa6e6e49b1e0f474132e77018b4d8a8fc78a853d)
Если вдобавок E = 1, так что ЧАС = г1⁄2, то угол φ на пересечении геодезических (Икс(т),у(т)) и линия у = константа определяется уравнением

Производная от φ дается классической производной формулой Гаусса:[63]

Геодезические полярные координаты

Если на поверхности задана метрика и зафиксирована базовая точка, появляется уникальная геодезическая, соединяющая базовую точку с каждой достаточно близкой точкой. Направление геодезической в базовой точке и расстояние однозначно определяют другую конечную точку. Эти два бита данных, направление и величина, таким образом, определяют касательный вектор в базовой точке. Карта от касательных векторов к конечным точкам плавно сметает окрестности базовой точки и определяет то, что называется «экспоненциальной картой», определяя локальную карту координат в этой базовой точке. Выметанная окрестность имеет те же свойства, что и шары в евклидовом пространстве, а именно любые две точки в ней соединены единственной геодезической. Это свойство называется «геодезической выпуклостью», а координаты - «нормальными координатами». Явное вычисление нормальных координат может быть выполнено путем рассмотрения дифференциального уравнения, которому удовлетворяют геодезические. Свойства выпуклости являются следствием Лемма Гаусса и его обобщения. Грубо говоря, эта лемма утверждает, что геодезические, начинающиеся в базовой точке, должны разрезать сферы фиксированного радиуса с центром в базовой точке под прямым углом. Геодезические полярные координаты получаются путем объединения экспоненциальной карты с полярными координатами касательных векторов в базовой точке. Тогда гауссова кривизна поверхности определяется отклонением метрики в точке второго порядка от евклидовой метрики. В частности, гауссова кривизна является инвариантом метрики, знаменитого метода Гаусса. Теорема Egregium. Удобный способ понять кривизну - это обычное дифференциальное уравнение, сначала рассмотренное Гауссом, а затем обобщенное Якоби, возникающее в результате изменения нормальных координат в двух разных точках. Уравнение Гаусса – Якоби предоставляет другой способ вычисления гауссовой кривизны. Геометрически он объясняет, что происходит с геодезическими от фиксированной базовой точки, когда конечная точка изменяется вдоль небольшого сегмента кривой через данные, записанные в Поле Якоби, а векторное поле по геодезической.[64] Спустя одно с четвертью столетия после Гаусса и Якоби, Марстон Морс дал более концептуальную интерпретацию поля Якоби в терминах вторых производных функции энергии на бесконечномерном Гильбертово многообразие путей.[65]
Экспоненциальная карта
Теория обыкновенные дифференциальные уравнения показывает, что если ж(т, v) гладко, то дифференциальное уравнение dv/dt = ж(т,v) с начальным условием v(0) = v0 имеет уникальное решение для |т| достаточно мал, и решение плавно зависит от т и v0. Отсюда следует, что при достаточно малых касательные векторы v в данный момент п = (Икс0,у0), есть геодезическая cv(т) определенная на (−2,2) с cv(0) = (Икс0,у0) и ċv(0) = v. Более того, если |s| ≤ 1, тогда cсв = cv(ул). В экспоненциальная карта определяется
- expп(v) = cv (1)
и дает диффеоморфизм между диском ‖v‖ < δ и окрестности п; в более общем плане отправка карты (п,v) к expп(v) дает локальный диффеоморфизм на окрестность точки (п,п). Экспоненциальное отображение дает геодезические нормальные координаты около п.[66]
Вычисление нормальных координат
Есть стандартная методика (см. Например Бергер (2004) ) для вычисления замены переменных к нормальным координатам ты, v в точке как формальное разложение в ряд Тейлора. Если координаты Икс, у в точке (0,0) локально ортогональны, пишем
- Икс(ты,v) = αu + L(ты,v) + λ(ты,v) + …
- у(ты,v) = βv + M(ты,v) + μ(ты,v) + …
где L, M квадратичны и λ, μ кубический однородные многочлены в ты и v. Если ты и v фиксируются, Икс(т) = Икс(ту,Телевизор) и у(т) = у(ту, Телевизор) можно считать формальным степенной ряд решения уравнений Эйлера: это однозначно определяет α, β, L, M, λ и μ.
Лемма Гаусса
В этих координатах матрица г(Икс) удовлетворяет г(0) = я и линии т ↦ Телевизор являются геодезическими через 0. Из уравнений Эйлера следует матричное уравнение
- г(v)v = v,
ключевой результат, обычно называемый Лемма Гаусса. Геометрически это утверждает, что
геодезические, проходящие через 0, разрезают круги с центром в 0 ортогонально.
Принимая полярные координаты (р,θ), то метрика имеет вид
- ds2 = доктор2 + г(р,θ) dθ2.
В геодезических координатах легко проверить, что геодезические до нуля минимизируют длину. Тогда топология на римановом многообразии задается функция расстояния d(п,q), а именно инфимум отрезков кусочно-гладких путей между п и q. Это расстояние реализуется локально геодезическими, так что в нормальных координатах d(0,v) = ‖v‖. Если радиус δ берется достаточно малым, небольшое уточнение леммы Гаусса показывает, что изображение U диска ‖v‖ < δ под экспоненциальным отображением геодезически выпуклый, т.е. любые две точки в U соединены уникальной геодезической, целиком лежащей внутри U.[67][68]
Теорема Egregium
Гаусса Теорема Egregium "Замечательная теорема" показывает, что гауссова кривизна поверхности может быть вычислена исключительно в терминах метрики и, таким образом, является внутренним инвариантом поверхности, не зависящим от каких-либо изометрическое вложение в E3 и не меняется при преобразованиях координат. В частности, изометрии поверхностей сохраняют гауссову кривизну.[69]
Эта теорема может быть выражена в терминах разложения метрики в степенной ряд: ds, задается в нормальных координатах (ты, v) так как
- ds2 = ду2 + dv2 − K(u dv – v du)2/12 + ….
Уравнение Гаусса – Якоби
Принятие изменения координаты от нормальных координат в п к нормальным координатам в ближайшей точке q, дает Уравнение Штурма – Лиувилля. удовлетворен ЧАС(р,θ) = г(р,θ)1⁄2, открытый Гауссом и позже обобщенный от Якоби,
ЧАСrr = –KH
В Якобиан изменения этой координаты при q равно ЧАСр. Это дает еще один способ установления внутренней природы гауссовой кривизны. Потому что ЧАС(р,θ) можно интерпретировать как длину линейного элемента в θ В направлении, уравнение Гаусса – Якоби показывает, что гауссова кривизна измеряет распространение геодезических на геометрической поверхности по мере их удаления от точки.[70]
Оператор Лапласа – Бельтрами
На поверхности с локальной метрикой

и Оператор Лапласа – Бельтрами

где ЧАС2 = НАПРИМЕР − F2, гауссова кривизна в точке определяется формулой[71]

где р обозначает геодезическое расстояние от точки.
В изотермические координаты, впервые рассмотренную Гауссом, требуется, чтобы метрика имела специальный вид

В этом случае оператор Лапласа – Бельтрами имеет вид

и φ удовлетворяет Уравнение Лиувилля[72]

Известно, что изотермические координаты существуют в окрестности любой точки на поверхности, хотя все доказательства на сегодняшний день опираются на нетривиальные результаты о уравнения в частных производных.[73] Для минимальных поверхностей существует элементарное доказательство.[74]
Теорема Гаусса – Бонне
На сфера или гиперболоид, площадь геодезического треугольника, то есть треугольника, все стороны которого являются геодезическими, пропорциональна разности суммы внутренних углов и π. Константа пропорциональности - это просто гауссова кривизна, постоянная для этих поверхностей. Для тора разница равна нулю, что отражает тот факт, что его гауссова кривизна равна нулю. Это стандартные результаты сферической, гиперболической и школьной тригонометрии (см. Ниже). Гаусс обобщил эти результаты на произвольную поверхность, показав, что интеграл гауссовой кривизны внутри геодезического треугольника также равен этой угловой разнице или превышению. Его формула показывала, что кривизна Гаусса может быть вычислена около точки как предел площади над угловым превышением для геодезических треугольников, сужающихся к точке. Поскольку любую замкнутую поверхность можно разложить на геодезические треугольники, формулу можно также использовать для вычисления интеграла кривизны по всей поверхности. Как частный случай того, что сейчас называется Теорема Гаусса – Бонне, Гаусс доказал, что этот интеграл всегда был 2π, умноженным на целое число, топологический инвариант поверхности, названный Эйлерова характеристика. Этот инвариант легко вычислить комбинаторно в терминах числа вершин, ребер и граней треугольников в разложении, также называемого триангуляция. Это взаимодействие между анализом и топологией было предвестником многих более поздних результатов в геометрии, кульминацией которых стало Теорема Атьи-Зингера об индексе. В частности, свойства кривизны накладывают ограничения на топологию поверхности.
Геодезические треугольники
Гаусс доказал, что если Δ геодезический треугольник на поверхности с углами α, β и γ в вершинах А, B и C, тогда

Фактически, принимая геодезические полярные координаты с началом А и AB, AC радиусы при полярных углах 0 и α:

где второе равенство следует из уравнения Гаусса – Якоби, а четвертое - из формулы производной Гаусса в ортогональных координатах (р,θ).
Формула Гаусса показывает, что кривизну в точке можно рассчитать как предел превышение угла α + β + γ - π над площадь для последовательно уменьшающихся геодезических треугольников около точки. Качественно поверхность имеет положительную или отрицательную кривизну по знаку превышения угла для сколь угодно малых геодезических треугольников.[75]
Теорема Гаусса – Бонне

Поскольку каждое компактное ориентированное двумерное многообразие M может быть триангулированный малыми геодезическими треугольниками следует, что

где χ(M) обозначает Эйлерова характеристика поверхности.
На самом деле, если есть F лица E края и V вершины, то 3F = 2E а левая часть равна 2πV - πF = 2π (V – E + F) = 2πχ(M).
Это знаменитый Теорема Гаусса – Бонне: он показывает, что интеграл от гауссовой кривизны является топологическим инвариантом многообразия, а именно эйлеровой характеристикой. Эту теорему можно интерпретировать по-разному; возможно, одной из самых далеко идущих стала теорема об индексе для эллиптический дифференциальный оператор на M, один из простейших случаев Теорема Атьи-Зингера об индексе. Другой связанный результат, который можно доказать с помощью теоремы Гаусса – Бонне, - это Теорема Пуанкаре-Хопфа об индексе для векторных полей на M которые обращаются в нуль только в конечном числе точек: сумма индексов в этих точках равна эйлеровой характеристике, где показатель точки определяется следующим образом: на маленьком круге вокруг каждого изолированного нуля векторное поле определяет отображение в единичный круг; индекс - это просто номер намотки этой карты.)[75][76][77]
Кривизна и вложения
Если гауссова кривизна поверхности M всюду положительна, то эйлерова характеристика положительна, поэтому M гомеоморфно (а значит, диффеоморфно) S2. Если к тому же поверхность изометрически вложена в E3, отображение Гаусса дает явный диффеоморфизм. Так как Адамар наблюдается, в этом случае поверхность выпуклый; этот критерий выпуклости можно рассматривать как 2-мерное обобщение известного критерия второй производной выпуклости плоских кривых. Гильберта доказал, что каждая изометрически вложенная замкнутая поверхность должна иметь точку положительной кривизны. Таким образом, замкнутое риманово 2-многообразие неположительной кривизны никогда не может быть вложено изометрически в E3; однако, как Адриано Гарсия показано с использованием Уравнение Бельтрами для квазиконформные отображения, это всегда возможно для некоторых конформно эквивалентный метрика.[78]
Поверхности постоянной кривизны
В односвязный поверхности постоянной кривизны 0, +1 и –1 являются евклидовой плоскостью, единичной сферой в E3, а гиперболическая плоскость. Каждый из них имеет транзитивный трехмерный Группа Ли сохранения ориентации изометрии г, которые можно использовать для изучения их геометрии. Каждую из двух некомпактных поверхностей можно отождествить с фактором г / K где K это максимальная компактная подгруппа из г. Вот K изоморфен ТАК (2). Любое другое замкнутое риманово двумерное многообразие M постоянной гауссовой кривизны, после масштабирования метрики на постоянный коэффициент, если необходимо, будет иметь одну из этих трех поверхностей в качестве универсальное перекрытие. В ориентируемом случае фундаментальная группа Γ из M можно отождествить с без кручения однородная подгруппа из г и M затем можно отождествить с двойное смежное пространство Γ г / K. В случае сферы и евклидовой плоскости единственными возможными примерами являются сама сфера и торы, полученные как частные от р2 дискретными подгруппами ранга 2. Для закрытых поверхностей род г ≥ 2, то пространство модулей римановых поверхностей, полученных как Γ варьируется по всем таким подгруппам, имеет реальную размерность 6г − 6.[79] По Пуанкаре теорема униформизации, любое ориентируемое замкнутое двумерное многообразие является конформно эквивалентный к поверхности постоянной кривизны 0, +1 или –1. Другими словами, умножив метрику на положительный коэффициент масштабирования, можно заставить гауссову кривизну принять ровно одно из этих значений (знак Эйлерова характеристика из M).[80]
Евклидова геометрия

В случае евклидовой плоскости группой симметрии является Группа евклидова движения, то полупрямой продукт двумерной группы перемещений группой вращений.[81] Геодезические - это прямые линии, а геометрия закодирована в элементарных формулах тригонометрия, такой как правило косинуса для треугольника со сторонами а, б, c и углы α, β, γ:

Плоские торы могут быть получены путем факторизации р2 по решетка, т.е. свободная абелева подгруппа ранга 2. Эти замкнутые поверхности не имеют изометрических вложений в E3. Тем не менее они допускают изометрические вложения в E4; в простейшем случае это следует из того факта, что тор является произведением двух окружностей, и каждая окружность может быть изометрически вложена в E2.[82]
Сферическая геометрия


Группа изометрий единичной сферы S2 в E3 ортогональная группа О (3), с группа ротации ТАК (3) как подгруппа изометрий, сохраняющих ориентацию. Это прямой продукт ТАК (3) с антиподальная карта, отправка Икс к –Икс.[83] Группа ТАК (3) действует транзитивно на S2. В подгруппа стабилизатора единичного вектора (0,0,1) можно отождествить с ТАК (2), так что S2 = SO (3) / SO (2).
Геодезические между двумя точками на сфере - это большой круг дуги с данными конечными точками. Если точки не антиподы, между точками существует единственная кратчайшая геодезическая. Геодезические также могут быть описаны группой теоретически: каждая геодезическая, проходящая через северный полюс (0,0,1), является орбитой подгруппы вращений вокруг оси через противоположные точки на экваторе.
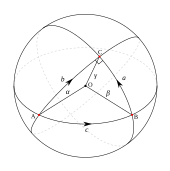
А сферический треугольник - геодезический треугольник на сфере. Определяется точками А, B, C на сфере со сторонами до н.э, CA, AB образованный из дуг большого круга длиной менее π. Если длины сторон равны а, б, c и углы между сторонами α, β, γ, то закон сферического косинуса утверждает, что

Площадь треугольника определяется как
- Площадь = α + β + γ - π.
С помощью стереографическая проекция от северного полюса сферу можно отождествить с расширенная комплексная плоскость C ∪ {∞}. Явное отображение дается

При этом соответствии каждое вращение S2 соответствует Преобразование Мёбиуса в SU (2), уникальный до подписи.[84] По координатам (ты, v) в комплексной плоскости сферическая метрика принимает вид[85]

Единичная сфера - это единственная замкнутая ориентируемая поверхность постоянной кривизны +1. Частное SO (3) / O (2) можно отождествить с реальная проективная плоскость. Он неориентируемый и может быть описан как частное от S2 на антиподальное отображение (умножение на −1). Сфера односвязна, а реальная проективная плоскость имеет фундаментальную группу Z2. В конечные подгруппы ТАК (3), соответствующие конечным подгруппам О (2) и группы симметрии платоновые тела, не действовать свободно S2, поэтому соответствующие факторы не являются двумерными многообразиями, а просто орбифолды.
Гиперболическая геометрия

Неевклидова геометрия[86] впервые обсуждался в письмах Гаусса, который провел обширные вычисления на рубеже девятнадцатого века, которые, хотя и были частными, он решил не печатать. В 1830 г. Лобачевский и независимо в 1832 г. Бойяи, сын корреспондента Гаусса, опубликовал синтетические версии этой новой геометрии, за что подвергся резкой критике. Однако только в 1868 году Бельтрами, за которым последовал Кляйн в 1871 г. и Пуанкаре в 1882 г. дали конкретные аналитические модели того, что Кляйн назвал гиперболическая геометрия. Появились четыре модели двумерной гиперболической геометрии:
- то Модель Бельтрами-Кляйна;
- то Диск Пуанкаре;
- то Верхняя полуплоскость Пуанкаре;
- то модель гиперболоида из Вильгельм Киллинг в 3-х мерном Пространство Минковского.
Первая модель, основанная на диске, имеет то преимущество, что геодезические на самом деле являются отрезками прямых (то есть пересечениями евклидовых прямых с открытым единичным кругом). Последняя модель имеет то преимущество, что она дает конструкцию, полностью параллельную конструкции единичной сферы в трехмерном евклидовом пространстве. Однако из-за их применения в комплексном анализе и геометрии наиболее широко используются модели Пуанкаре: они взаимозаменяемы благодаря преобразованиям Мёбиуса между диском и верхней полуплоскостью.
Позволять

быть Диск Пуанкаре в комплексной плоскости с Метрика Пуанкаре

В полярных координатах (р, θ) метрика дается

Длина кривой γ:[а,б] → D дается формулой

Группа г = СУ (1,1) данный

действует транзитивно Преобразования Мебиуса на D и подгруппа стабилизатора 0 - группа вращения

Фактор-группа СУ (1,1) / ±я группа сохраняющих ориентацию изометрий D. Любые две точки z, ш в D соединены уникальной геодезической, заданной частью окружности или прямой линии, проходящей через z и ш и ортогонален граничной окружности. Расстояние между z и ш дан кем-то

Особенно d(0,р) = 2 танх−1 р и c(т) = 1/2танх т - геодезическая, проходящая через 0 вдоль вещественной оси, параметризованная длиной дуги.
Топология, определяемая этой метрикой, эквивалентна обычной евклидовой топологии, хотя как метрическое пространство (D,d) завершено.
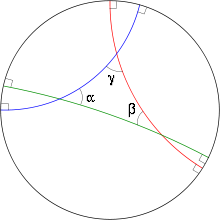
А гиперболический треугольник является геодезическим треугольником для этой метрики: любые три точки в D являются вершинами гиперболического треугольника. Если стороны имеют длину а, б, c с соответствующими углами α, β, γ, то правило гиперболического косинуса утверждает, что

Площадь гиперболического треугольника определяется выражением[87]
- Площадь = π - α – β – γ.
Единичный диск и верхняя полуплоскость

конформно эквивалентны преобразованиями Мёбиуса

При этом соответствии действие SL (2, R) преобразованиями Мёбиуса на ЧАС соответствует тому из СУ (1,1) на D. Метрика на ЧАС становится

Поскольку прямые или окружности сохраняются при преобразованиях Мёбиуса, геодезические снова описываются линиями или окружностями, ортогональными к действительной оси.
Единичный круг с метрикой Пуанкаре - это единственное односвязное ориентированное двумерное риманово многообразие постоянной кривизны −1. Любая ориентированная замкнутая поверхность M с этим свойством D в качестве универсального покрытия. это фундаментальная группа можно отождествить с компактной подгруппой без кручения Γ из СУ (1,1), таким образом, что

В таком случае Γ это конечно представленная группа. Образующие и отношения закодированы в геодезически выпуклом фундаментальный геодезический многоугольник в D (или ЧАС) геометрически соответствующие замкнутым геодезическим на M.
Примеры.
- то Поверхность Больца рода 2;
- то Кляйн квартика рода 3;
- то Поверхность Macbeath рода 7;
- то Первая тройка Гурвица рода 14.
Униформа
Учитывая ориентированную замкнутую поверхность M с гауссовой кривизной K, метрика на M можно изменить конформно, масштабируя его в раз е2ты. Новая гауссова кривизна K ′ тогда дается

где Δ - лапласиан исходной метрики. Таким образом, чтобы показать, что данная поверхность конформно эквивалентна метрике постоянной кривизны K ′ достаточно решить следующий вариант Уравнение Лиувилля:

Когда M имеет эйлерову характеристику 0, поэтому диффеоморфен тор, K ′ = 0, так что это сводится к решению

По стандартной эллиптической теории это возможно, потому что интеграл от K над M равен нулю по теореме Гаусса – Бонне.[88]
Когда M имеет отрицательную эйлерову характеристику, K ′ = −1, поэтому решаемое уравнение:

Используя непрерывность экспоненциального отображения на Соболевское пространство из-за Нил Трудингер, это нелинейное уравнение всегда можно решить.[89]
Наконец, в случае 2-сферы, K ′ = 1 и уравнение становится:

До сих пор это нелинейное уравнение не анализировалось напрямую, хотя классические результаты, такие как Теорема Римана-Роха подразумевают, что у него всегда есть решение.[90] Методика Риччи поток, разработан Ричард С. Гамильтон, дает еще одно доказательство существования, основанное на нелинейных уравнения в частных производных чтобы доказать существование.[91] Фактически поток Риччи на конформных метриках на S2 определяется на функциях ты(Икс, т) от

Спустя конечное время Чоу показал, что K ′ становится положительным; предыдущие результаты Гамильтона могут быть использованы, чтобы показать, что K ′ сходится к +1.[92] До этих результатов по потоку Риччи, Осгуд, Филлипс и Сарнак (1988) предоставил альтернативный и технически более простой подход к униформизации, основанный на потоке на римановых метриках г определяется log det Δг.
Простое доказательство с использованием только эллиптических операторов, открытых в 1988 г., можно найти в Динь (2001). Позволять г быть Функция Грина на S2 удовлетворение Δг = 1 + 4πδп, где δп точечная мера в фиксированной точке п из S2. Уравнение Δv = 2K – 2, имеет гладкое решение v, поскольку правая часть имеет интеграл 0 по теореме Гаусса – Бонне. Таким образом φ = 2г + v удовлетворяет Δφ = 2K далеко от п. Это следует из того г1 = еφг - полная метрика постоянной кривизны 0 на дополнении к п, которая поэтому изометрична плоскости. Составление с стереографическая проекция, то существует гладкая функция ты такой, что е2тыг имеет гауссову кривизну +1 на дополнении к п. Функция ты автоматически расширяется до плавной функции на всей S2.[b]
Риманова связь и параллельный транспорт

Классический подход Гаусса к дифференциальной геометрии поверхностей был стандартным элементарным подходом.[93] которые предшествовали появлению концепций Риманово многообразие по инициативе Бернхард Риманн в середине девятнадцатого века и связь разработан Туллио Леви-Чивита, Эли Картан и Герман Вейль в начале ХХ века. Понятие связи, ковариантная производная и параллельный транспорт дал более концептуальный и единообразный способ понимания кривизны, который не только позволил обобщить многомерные многообразия, но также предоставил важный инструмент для определения новых геометрических инвариантов, названный характеристические классы.[94] Подход с использованием ковариантных производных и связей в настоящее время принят в более сложных учебниках.[95]
Ковариантная производная
Связи на поверхности можно определить с различных эквивалентных, но одинаково важных точек зрения. В Риманова связь или Леви-Чивита связь.[96] пожалуй, проще всего понять с точки зрения подъема векторные поля, считается первым порядком дифференциальные операторы действующие на функции на многообразии, к дифференциальным операторам на многообразии касательный пучок или комплект кадров. В случае вложенной поверхности подъем до оператора на векторных полях, называемый ковариантная производная, очень просто описывается в терминах ортогональной проекции. Действительно, векторное поле на поверхности, вложенной в р3 можно рассматривать как функцию от поверхности к р3. Другое векторное поле действует как дифференциальный оператор покомпонентно. Результирующее векторное поле не будет касаться поверхности, но это можно исправить, взяв его ортогональную проекцию на касательное пространство в каждой точке поверхности. Так как Риччи и Леви-Чивита Реализованный на рубеже двадцатого века, этот процесс зависит только от метрики и может быть локально выражен в терминах символов Кристоффеля.
Параллельный транспорт
Параллельный транспорт касательных векторов вдоль кривой на поверхности был следующим крупным достижением в этой теме, благодаря Леви-Чивита.[75] Это связано с более ранним понятием ковариантной производной, потому что это монодромия из обыкновенное дифференциальное уравнение на кривой, определяемой ковариантной производной по вектору скорости кривой. Параллельный перенос по геодезическим, «прямым линиям» поверхности, также можно легко описать напрямую. Вектор в касательной плоскости переносится по геодезической как единственное векторное поле постоянной длины и составляющее постоянный угол с вектором скорости геодезической. Для общей кривой этот процесс должен быть изменен с использованием геодезической кривизны, которая измеряет, насколько кривая отклоняется от геодезической.[67]
Векторное поле v(т) по кривой единичной скорости c(т), с геодезической кривизной kг(т), называется параллельным вдоль кривой, если
- он имеет постоянную длину
- угол θ(т) что он делает с вектором скорости ċ(т) удовлетворяет

Это повторяет правило параллельного переноса по геодезической или кусочно-геодезической кривой, потому что в этом случае kг = 0, так что угол θ(т) должен оставаться постоянным на любом геодезическом отрезке. Существование параллельного транспорта следует потому, что θ(т) можно вычислить как интеграл геодезической кривизны. Поскольку он, следовательно, непрерывно зависит от L2 норма kг, то параллельный перенос для произвольной кривой может быть получен как предел параллельного переноса на аппроксимирующих кусочно-геодезических кривых.[97]
Таким образом, связь может быть описана в терминах подъемных путей в многообразии к путям в касательном или ортонормированном расслоении реперов, что формализует классическую теорию "подвижная рама ", любимый французскими авторами.[98] Подъем петель вокруг точки порождает группа голономии в таком случае. Гауссову кривизну в точке можно восстановить путем параллельного переноса вокруг все более мелких петель в точке. Эквивалентно кривизну можно рассчитать непосредственно на бесконечно малом уровне с точки зрения Скобки лжи поднятых векторных полей.

Подключение 1-форма
Подход Картана и Вейля, использующий 1-формы связи на комплект кадров из M, дает третий способ понять риманову связь. Они заметили, что параллельный перенос требует, чтобы путь на поверхности поднимался до пути в связке кадров, так что его касательные векторы лежат в специальном подпространстве коразмерности один в трехмерном касательном пространстве связки кадров. Проекция на это подпространство определяется дифференциальной 1-формой на расслоении ортонормированных реперов, форма подключения. Это позволило закодировать свойства кривизны поверхности в дифференциальные формы на расслоении реперов и формулах, включающих их внешние производные.
Этот подход особенно прост для заделанной поверхности. Благодаря результату Кобаяши (1956), 1-форма связности на поверхности, вложенной в евклидово пространство E3 это просто откат под карту Гаусса 1-формы связности на S2.[99] Используя идентификацию S2 с однородное пространство SO (3) / SO (2), форма связи 1 является лишь составной частью 1-форма Маурера – Картана на ТАК (3).[100]
Глобальная дифференциальная геометрия поверхностей
Хотя характеристика кривизны включает только локальную геометрию поверхности, существуют важные глобальные аспекты, такие как Теорема Гаусса – Бонне, то теорема униформизации, теорему фон Мангольдта-Адамара и теорему о вложимости. Есть и другие важные аспекты глобальной геометрии поверхностей.[101] Они включают:
- Радиус приемистости, определяемый как наибольший р такие, что две точки на расстоянии меньше, чем р соединены уникальной геодезической. Вильгельм Клингенберг доказал в 1959 г., что радиус инъективности замкнутой поверхности ограничен снизу минимумом δ = π/√суп K и длина ее наименьшей замкнутой геодезической. Это улучшило теорему Бонне, который в 1855 г. показал, что диаметр замкнутой поверхности положительной гауссовой кривизны всегда ограничен сверху величиной δ; другими словами, геодезическая, реализующая метрическое расстояние между двумя точками, не может иметь длину больше, чем δ.
- Жесткость. В 1927 г. Кон-Фоссен доказал, что два овалоиды - замкнутые поверхности с положительной гауссовой кривизной - которые изометричны, обязательно конгруэнтны по изометрии E3. Более того, замкнутая вложенная поверхность с положительной гауссовой кривизной и постоянной средней кривизной обязательно является сферой; аналогично замкнутая вложенная поверхность постоянной гауссовой кривизны должна быть сферой (Liebmann 1899). Хайнц Хопф в 1950 году показал, что замкнутая вложенная поверхность с постоянной средней кривизной и родом 0, т.е. гомеоморфная сфере, обязательно является сферой; пять лет спустя Александров снял топологическое предположение. В 1980-х годах Венте построил погруженный торы постоянной средней кривизны в трехмерном евклидовом пространстве.
- Гипотеза Каратеодори: Эта гипотеза утверждает, что замкнутая выпуклая трижды дифференцируемая поверхность допускает не менее двух пупочные точки. Первая работа над этой гипотезой была проведена в 1924 г. Ганс Гамбургер, который заметил, что это следует из следующего более сильного утверждения: полуцелозначный индекс основного слоения кривизны изолированной омбилики не превосходит единицы.
- Нулевая гауссова кривизна: полная поверхность в E3 с нулевой гауссовой кривизной должен быть цилиндром или плоскостью.
- Теорема гильберта (1901): никакая полная поверхность с постоянной отрицательной кривизной не может быть погруженный изометрически в E3.

- В Гипотеза Уиллмора. Эта гипотеза утверждает, что интеграл от квадрата средней кривизны тора, погруженного в E3 должен быть ограничен снизу 2π2. Известно, что интеграл инвариант Мебиуса. Это было решено в 2012 году Фернандо Кода Маркес и Андре Невес.[102]
- Изопериметрические неравенства. В 1939 году Шмидт доказал, что классическое изопериметрическое неравенство для кривых на евклидовой плоскости справедливо и на сфере или в гиперболической плоскости: а именно, он показал, что среди всех замкнутых кривых, ограничивающих область фиксированной площади, периметр минимизируется, когда кривая круг для метрики. На одно измерение выше известно, что среди всех замкнутых поверхностей в E3 возникающая как граница ограниченной области единичного объема, площадь поверхности минимизируется для евклидова шара.
- Систолические неравенства для кривых на поверхностях. Учитывая замкнутую поверхность, ее систола определяется как наименьшая длина любой несжимаемой замкнутой кривой на поверхности. В 1949 г. Loewner оказался неравенство тора для метрик на торе, а именно, что площадь тора над квадратом его систолы ограничена снизу величиной √3/2, с равенством в плоском (постоянная кривизна) случае. Аналогичный результат дает Неравенство Пу для вещественной проективной плоскости с 1952 г., с нижней оценкой 2/π также достигается в случае постоянной кривизны. Для Бутылка Клейна, Блаттер и Бавард позже получили нижнюю оценку √8/π. Для закрытой поверхности рода г, Хебда и Бураго показали, что отношение ограничено снизу величиной 1/2. Три года спустя Михаил Громов нашел нижнюю границу, заданную постоянным временем г1⁄2, хотя это не оптимально. Асимптотически точные верхняя и нижняя границы, заданные постоянными временами г/(журнал г)2 принадлежат Громову и Бузер-Сарнаку, их можно найти в Кац (2007). Также существует вариант для метрики на сфере, принимая за систолу длину наименьшего закрытая геодезическая. Громов предположил нижнюю оценку 1/2√3 в 1980 г .: лучший результат - нижняя граница 1/8 получена Региной Ротман в 2006 году.[103]
Руководство по чтению
Один из наиболее полных вводных обзоров предмета, отражающих историческое развитие от Гаусса до наших дней, сделан Бергер (2004). Изложение классической теории дано в Эйзенхарт (2004), Крейсциг (1991) и Струик (1988); более современные обильно иллюстрированные учебники для студентов Грей, Аббена и Саламон (2006), Прессли (2001) и Уилсон (2008) можно было бы найти более доступным. Доступное изложение классической теории можно найти в Гильберт и Кон-Фоссен (1952). Более сложные процедуры для выпускников с использованием Риманова связность на поверхности можно найти в Певица и Торп (1967), ду Карму (2016) и О'Нил (2006).
Смотрите также
Заметки
- ^ Обратите внимание, что в некоторых более поздних текстах симметричная билинейная форма в правой части упоминается как вторая фундаментальная форма; однако в целом он не соответствует классически определенной второй фундаментальной форме.
- ^ Это следует из рассуждения с использованием теоремы Мешки и Уленбек (1981) на устранимых особенностях гармонические карты конечной энергии.
- ^ а б Гаусс 1902.
- ^ Струик 1987, стр. 50-53
- ^ Уэллс 2017, стр. 17-30
- ^ Эйлер 1760
- ^ Эйлер 1771
- ^ Крейсиг 1991
- ^ Струик 1988
- ^ Уорнер 1983
- ^ Хитчин 2013, п. 45
- ^ ду Карму 2016, стр. 54-56
- ^ Уилсон 2008, п. 115
- ^ Pressley, стр. 68-77
- ^ ду Карму 2016, стр.55
- ^ ду Карму 2016, стр. 60-65
- ^ О'Нил 2006, п. 113
- ^ Ли "Введение в гладкие многообразия"
- ^ ду Карму 2016, стр.72
- ^ Струик 1988
- ^ Крейсиг 1991
- ^ Певица и Торп 1966, п. 100–114
- ^ Певица и Торп 1966, п. 133-134
- ^ Ду Карму 2016, стр.155-157
- ^ Ду Карму, страница 235
- ^ Ду Карму, страница 238
- ^ Ду Карму, страницы 237-238
- ^ Струик 1961, п. 112
- ^ Darboux, Vol. III, стр. 246
- ^ Бергер. Панорамный вид римановой геометрии.
- ^ О'Нил 2006, п. 257
- ^ ду Карму 2016, стр. 309–314
- ^ Хитчин 2013, п. 57
- ^ ду Карму 2016, п. 221-222
- ^ О'Нил 2006, стр. 281-289.
- ^ Хитчин 2013, стр. 57-58
- ^ ду Карму 2016, п. 223
- ^ ду Карму 2016, стр. 222-223
- ^ ду Карму 2016, стр. 224-225
- ^ Ду Карму, стр.183
- ^ Ду Карму, страница 242
- ^ Хитчин 2013
- ^ Струик 1961
- ^ О'Нил 2006
- ^ Ду Карму, страница 242
- ^ Спивак, "Комплексное введение в дифференциальную геометрию, т. III". Стр.157.
- ^ Спивак, страницы 161-166
- ^ Спивак, стр.168
- ^ Эйзенхарт 2004, стр. 228–229
- ^ Эйзенхарт 2004, стр. 241–250; ду Карму 2016 С. 188–197.
- ^ ду Карму 2016, п. 194.
- ^ Эйзенхарт 2004 С. 61–65.
- ^ Эйзенхарт 2004
- ^ Эйзенхарт 2004, стр. 250–269; ду Карму 2016 С. 197–213.
- ^ Решение Дугласа описано в Курант (1950).
- ^ Эйзенхарт 2004 С. 270–291; О'Нил, стр. 249–251; Гильберт и Кон-Фоссен, 1952 г..
- ^ О'Нил, стр. 249–251; ду Карму, стр. 168–170; Грей, Аббена и Саламон 2006.
- ^ Stillwell 1996, стр. 1–5.
- ^ Уилсон 2008.
- ^ О'Нил 2006, стр. 195–216; ду Карму 2016, стр. 134–153; Певица и Торп 1967 С. 216–224.
- ^ Грей, Аббена и Саламон 2006, п. 386.
- ^ Бергер 2004; Уилсон 2008; Милнор 1963.
- ^ Эйзенхарт 2002, п. 131; Бергер 2004, п. 39; ду Карму 2016, п. 248; О'Нил 2006, п. 237
- ^ Эйзенхарт 2004; Тейлор 1996a, pp. 472-473, Приложение C.
- ^ Эйзенхарт 2004, раздел 88; Бергер 2004.
- ^ ду Карму 2016, п. 357
- ^ Милнор 1963
- ^ Уилсон 2008
- ^ а б Бергер 2004
- ^ ду Карму 2016, стр. 303–305
- ^ Бергер 2004, стр.41, 61, 123-124
- ^ О'Нил 2006, п. 395
- ^ Хелгасон 1978, п. 92
- ^ О'Нил 2006, п. 286
- ^ ду Карму 2016, п. 227
- ^ Оссерман 2002, стр. 31–32
- ^ а б c Эйзенхарт 2004
- ^ ду Карму 2016, стр. 283-286
- ^ Торп 1994, стр 201-207
- ^ Певица и Торп 1967; Гарсия, Адриано М. (1961), "Вложение замкнутых римановых поверхностей в евклидово пространство", Комментарий. Математика. Helv., 35: 93–110, Дои:10.1007 / BF02567009
- ^ Имаёши и Танигучи 1992, стр. 47–49
- ^ Бергер 1977; Тейлор 1996.
- ^ Уилсон 2008, стр. 1–23, Глава I, Евклидова геометрия.
- ^ ду Карму 2016.
- ^ Уилсон 2008, стр. 25–49, Глава II, Сферическая геометрия.
- ^ Уилсон 2008, Глава 2.
- ^ Эйзенхарт 2004, п. 110.
- ^ Стиллвелл 1990; Бонола, Карслав и Энрикес 1955.
- ^ Уилсон 2008, Глава 5.
- ^ Тейлор 1996b, п. 107; Бергер 1977 С. 341–343.
- ^ Бергер 1977, стр. 222–225; Тейлор 1996b С. 101–108.
- ^ Тейлор 1996b
- ^ Чау 1991
- ^ Чен, Лу и Тиан (2006) указал и исправил недостающий шаг в подходе Гамильтона и Чоу; смотрите также Эндрюс и Брайан (2009).
- ^ Эйзенхарт 2004; Крейсиг 1991; Бергер 2004; Уилсон 2008.
- ^ Кобаяси и Номидзу 1969, Глава XII.
- ^ ду Карму 2016; О'Нил 2006; Певица и Торп 1967.
- ^ Леви-Чивита 1917
- ^ Арнольд 1989, pp. 301–306, приложение I .; Бергер 2004 С. 263–264.
- ^ Дарбу.
- ^ Кобаяси и Номидзу 1969
- ^ Айви и Ландсберг, 2003 г..
- ^ Бергер 2004, стр. 145–161; ду Карму 2016; Черн 1967; Хопф 1989.
- ^ Кода Маркес, Фернандо; Невес, Андре (2014). «Теория Мин-Макса и гипотеза Уиллмора». Анналы математики. 179 (2): 683–782. arXiv:1202.6036. Дои:10.4007 / летопись.2014.179.2.6. JSTOR 24522767.
- ^ Ротман, Р. (2006) "Длина кратчайшей замкнутой геодезической и площадь двумерной сферы", Proc. Амер. Математика. Soc. 134: 3041-3047. Предыдущие нижние оценки были получены Кроком, Ротман-Набутовским и Сабурау.
использованная литература
- Эндрюс, Бен; Брайан, Пол (2010), "Границы кривизны путем изопериметрического сравнения для нормализованного потока Риччи на двумерной сфере", Расчет. Вар. Уравнения с частными производными, 39 (3–4): 419–428, arXiv:0908.3606, Дои:10.1007 / s00526-010-0315-5
- Арнольд, В. (1989), Математические методы классической механики, Тексты для выпускников по математике, 60 (2-е изд.), Нью-Йорк: Springer-Verlag, ISBN 978-0-387-90314-9; перевод с русского К. Фогтманна и А. Вайнштейна.
- Бергер, Марсель (2004), Панорамный вид римановой геометрии, Springer-Verlag, ISBN 978-3-540-65317-2
- Бергер, Мелвин С. (1977), Нелинейность и функциональный анализ, Academic Press, ISBN 978-0-12-090350-4
- Бонола, Роберто; Carslaw, H. S .; Энрикес, Ф. (1955), Неевклидова геометрия: критическое и историческое исследование ее развития, Дувр, ISBN 978-0-486-60027-7
- Бутби, Уильям М. (1986), Введение в дифференцируемые многообразия и риманову геометрию, Чистая и прикладная математика, 120 (2-е изд.), Academic Press, ISBN 0121160521
- Картан, Эли (1983), Геометрия римановых пространств, Math Sci Press, ISBN 978-0-915692-34-7; переведено со 2-го издания Leçons sur la géométrie des espaces de Riemann (1951) Джеймса Глейзбрука.
- Картан, Эли (2001), Риманова геометрия в ортогональной системе отсчета (из лекций Э. Картана в Сорбонне в 1926-1927 гг.) (PDF), World Scientific, ISBN 978-981-02-4746-1[мертвая ссылка ]; перевод с русского В. В. Гольдберга с предисловием С. С. Черн.
- Картан, Анри (1971), Рассчитать дифференциал (На французском), Германн, ISBN 9780395120330
- Чен, Xiuxiong; Лу, Пэн; Тиан, банда (2006), "Заметка об униформизации римановых поверхностей потоком Риччи", Proc. AMS, 134 (11): 3391–3393, Дои:10.1090 / S0002-9939-06-08360-2
- Черн, С.С. (1967), Кривые и поверхности в евклидовых пространствах, Магистр математических наук, Математическая ассоциация Америки
- Чоу Б. (1991), "Поток Риччи на двумерной сфере", J. Diff. Геом., 33 (2): 325–334, Дои:10.4310 / jdg / 1214446319
- Курант, Ричард (1950), Принцип Дирихле, конформное отображение и минимальные поверхности, Джон Уайли и сыновья, ISBN 978-0-486-44552-6
- Дарбу, Гастон, Leçons sur la théorie générale des поверхностей, Готье-Виллар Том I (1887 г.), Том II (1915) [1889], Том III (1894 г.), Том IV (1896 г.).
- Динг, В. (2001), "Доказательство теоремы униформизации на S2", J. Уравнения с частными производными, 14: 247–250
- ду Карму, Манфреду П. (2016), Дифференциальная геометрия кривых и поверхностей. (исправленное и обновленное 2-е изд.), Mineola, NY: Dover Publications, Inc., ISBN 0-486-80699-5
- ду Карму, Манфреду (1992), Риманова геометрия, Математика: теория и приложения, Биркхойзер, ISBN 0-8176-3490-8
- Эйзенхарт, Лютер Пфалер (2004), Трактат о дифференциальной геометрии кривых и поверхностей (перепечатка издания 1909 г.), Dover Publications, Inc., ISBN 0-486-43820-1
- Эйлер, Леонард (1760), "Исследования по курбюру поверхностей", Mémoires de l'Académie des Sciences de Berlin (опубликовано в 1767 г.), 16: 119–143.
- Эйлер, Леонард (1771), "De solidis quorum superficiem in planum explicare licet", Новые комментарии Academiae Scientiarum Petropolitanae (опубликовано в 1772 г.), 16: 3–34.
- Гаусс, Карл Фридрих (1902), Общие исследования криволинейных поверхностей 1825 и 1827 гг., Библиотека Принстонского университета перевод А.М. Hiltebeitel и J.C. Morehead; "Disquisitiones generales около superficies curvas", Комментарии Societatis Regiae Scientiarum Gottingesis Recentiores Vol. VI (1827), стр. 99–146.
- Гаусс, Карл Фридрих (1965), Общие исследования криволинейных поверхностей, перевод А. Hiltebeitel; Дж. К. Морхед, Хьюлетт, Нью-Йорк: Raven Press, OCLC 228665499.
- Гаусс, Карл Фридрих (2005), Общие исследования криволинейных поверхностей, отредактированный с новым введением и примечаниями Питера Пешича, Минеола, Нью-Йорк: Dover Publications, ISBN 978-0-486-44645-5.
- Грей, Альфред; Аббена, Эльза; Саламон, Саймон (2006), Современная дифференциальная геометрия кривых и поверхностей с помощью Mathematica®, Исследования в области высшей математики (3-е изд.), Бока-Ратон, Флорида: Chapman & Hall / CRC, ISBN 978-1-58488-448-4
- Хан, Цин; Хун, Цзя-Син (2006), Изометрические вложения римановых многообразий в евклидовы пространства, Американское математическое общество, ISBN 978-0-8218-4071-9
- Хельгасон, Сигурдур (1978), Дифференциальная геометрия , группы Ли и симметричные пространства, Academic Press, Нью-Йорк, ISBN 978-0-12-338460-7
- Гильберт, Дэвид; Кон-Фоссен, Стефан (1952), Геометрия и воображение (2-е изд.), Нью-Йорк: Челси, ISBN 978-0-8284-1087-8
- Хитчин, Найджел (2013), Геометрия поверхностей (PDF)
- Хопф, Хайнц (1989), Лекции по дифференциальной геометрии в целом, Конспект лекций по математике, 1000, Springer-Verlag, ISBN 978-3-540-51497-8
- Imayoshi, Y .; Танигучи, М. (1992), Введение в пространства Techmüller, Springer-Verlag, ISBN 978-0-387-70088-5
- Ivey, Thomas A .; Ландсберг, Дж. М. (2003), Картан для начинающих: дифференциальная геометрия с помощью подвижных рам и внешних систем, Аспирантура по математике, 61, Американское математическое общество, ISBN 978-0-8218-3375-9
- Кац, Михаил Г. (2007), Систолическая геометрия и топология, Математические обзоры и монографии, 137, Американское математическое общество, ISBN 978-0-8218-4177-8
- Кобаяси, Шошичи (1956), "Индуцированные связи и вложенное риманово пространство", Nagoya Math. Дж., 10: 15–25, Дои:10.1017 / S0027763000000052
- Кобаяси, Шошичи (1957), «Теория связей», Annali di Matematica Pura ed Applicata, Серия 4, 43: 119–194, Дои:10.1007 / BF02411907,
- Кобаяси, Шошичи; Номидзу, Кацуми (1963), Основы дифференциальной геометрии. я, Wiley Interscience, ISBN 978-0-470-49648-0
- Кобаяси, Шошичи; Номидзу, Кацуми (1969), Основы дифференциальной геометрии. II, Wiley Interscience, ISBN 978-0-470-49648-0
- Крейсциг, Эрвин (1991), Дифференциальная геометрия, Дувр, ISBN 978-0-486-66721-8
- Кюнель, Вольфганг (2006), Дифференциальная геометрия: кривые - поверхности - многообразия, Американское математическое общество, ISBN 978-0-8218-3988-1
- Леви-Чивита, Туллио (1917), "Nozione di parallelismo in una varietà qualunque" (PDF), Ренд. Circ. Мат. Палермо, 42: 173–205, Дои:10.1007 / BF03014898
- О'Нил, Барретт (2006), Элементарная дифференциальная геометрия (пересмотренное 2-е изд.), Амстердам: Elsevier / Academic Press, ISBN 0-12-088735-5
- Осгуд, Б .; Phillips, R .; Сарнак, П. (1988), "Экстремали определителей лапласианов", J. Funct. Анальный., 80: 148–211, Дои:10.1016/0022-1236(88)90070-5
- Оссерман, Роберт (2002), Обзор минимальных поверхностей, Дувр, ISBN 978-0-486-49514-9
- Ян Р. Портеус (2001) Геометрическая дифференциация: для интеллектуальных кривых и поверхностей, Издательство Кембриджского университета ISBN 0-521-00264-8.
- Прессли, Эндрю (2001), Элементарная дифференциальная геометрия, Серия Springer по математике для студентов, Springer-Verlag, ISBN 978-1-85233-152-8
- Sacks, J .; Уленбек, Карен (1981), "Существование минимальных погружений 2-сфер", Анна. математики., 112 (1): 1–24, Дои:10.2307/1971131, JSTOR 1971131
- Певец, Исадор М.; Торп, Джон А. (1967), Конспект лекций по элементарной топологии и геометрии, Springer-Verlag, ISBN 978-0-387-90202-9
- Спивак Михаил (1965), Исчисление на многообразиях. Современный подход к классическим теоремам продвинутого исчисления, В. А. Бенджамин
- Стиллвелл, Джон (1996), Источники гиперболической геометрии, Американское математическое общество, ISBN 978-0-8218-0558-9
- Струик, Дирк (1987), Краткая история математики (4-е изд.), Dover Publications, ISBN 0486602559
- Струик, Дирк Дж. (1988), Лекции по классической дифференциальной геометрии (перепечатка 2-го изд.), Нью-Йорк: Dover Publications, Inc., ISBN 0-486-65609-8
- Тейлор, Майкл Э. (1996a), Уравнения с частными производными II: качественное исследование линейных уравнений, Springer-Verlag, ISBN 978-1-4419-7051-0
- Тейлор, Майкл Э. (1996b), Уравнения в частных производных III: Нелинейные уравнения, Springer-Verlag, ISBN 978-1-4419-7048-0
- Торп, Джон А. (1994), Элементарные разделы дифференциальной геометрии, Тексты для бакалавриата по математике, Springer-Verlag, ISBN 0387903577
- Топоногов, Виктор Александрович (2005), Дифференциальная геометрия кривых и поверхностей: краткое руководство, Springer-Verlag, ISBN 978-0-8176-4384-3
- Валирон, Жорж (1986), Классическая дифференциальная геометрия кривых и поверхностей., Math Sci Press, ISBN 978-0-915692-39-2 Полный текст книги
- Уорнер, Фрэнк В. (1983), Основы дифференцируемых многообразий и групп Ли, Тексты для выпускников по математике, 94, Спрингер, ISBN 0-387-90894-3
- Уэллс, Р. О. (2017), Дифференциальная и сложная геометрия: истоки, абстракции и вложения, Спрингер, ISBN 9783319581842
- Уилсон, Пелхэм (2008), Искривленное пространство: от классической геометрии к элементарной дифференциальной геометрии, Издательство Кембриджского университета, ISBN 978-0-521-71390-0
внешние ссылки
 СМИ, связанные с Дифференциальная геометрия поверхностей в Wikimedia Commons
СМИ, связанные с Дифференциальная геометрия поверхностей в Wikimedia Commons